
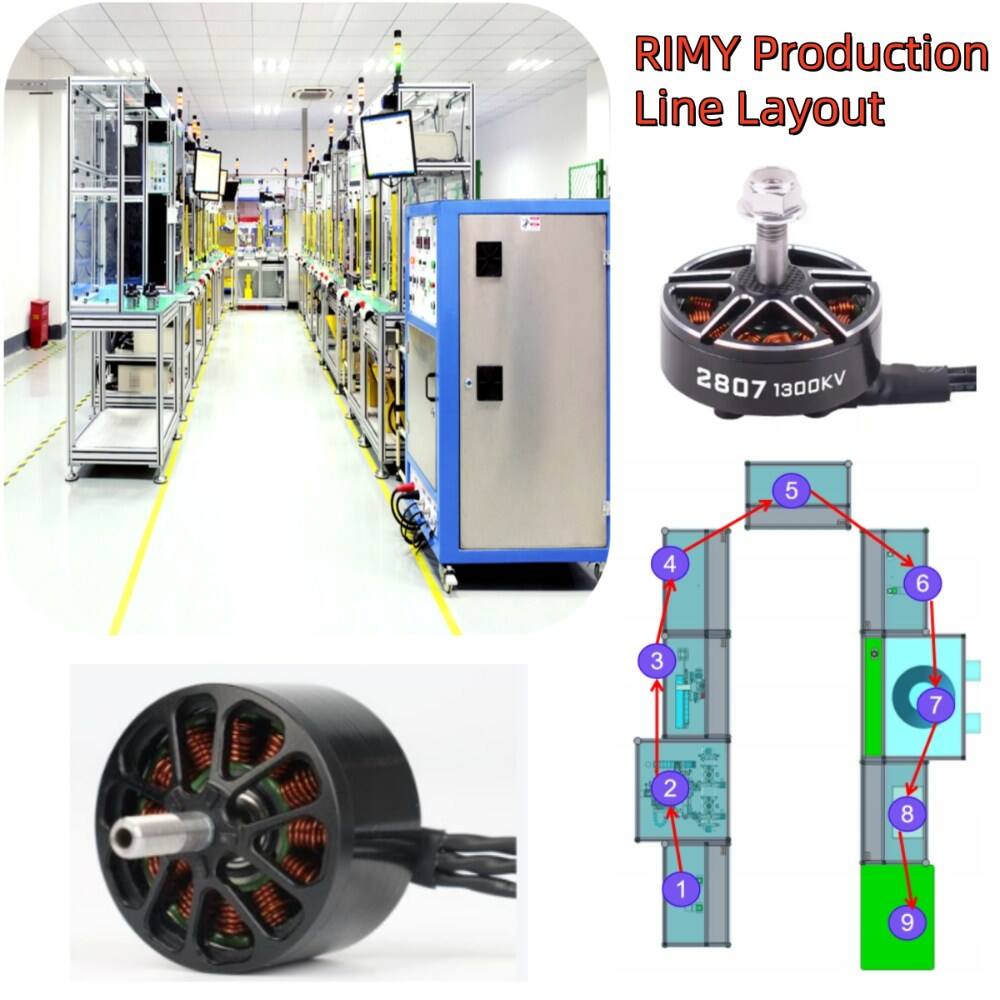
Lennottomien ilmailulaitteiden (UAV) alan nopea laajeneminen on luonut ennennäkemättömiä vaatimuksia korkean suorituskyvyn mikrokollektorittomille moottoreille, mikä saa valmistajat etsimään edistyneitä automaatioteknologioita, jotka tarjoavat johdonmukaista laatua suurella mittakaavalla. Nykyaikainen dronemoottorituotantolinja järjestelmien on saavutettava erinomainen tarkkuus kääntötoiminnoissa samalla kun säilytetään hauras tasapainovaatimus, joka vaikuttaa suoraan lentovakauden ja energiatehokkuuden varmistamiseen. Kaupallisten ja teollisten dronetoimintojen leviäessä laajalti eri aloille – maataloudesta logistiikkaan – moottorivalmistajien on optimoitava tuotantoprosessejaan, lyhennettävä kiertoaikoja ja poistettava vaihtelua, joka voisi vaarantaa suorituskyvyn vaativissa käyttöympäristöissä.
Viimeaikaiset teknologiset läpimurrot automatisoiduissa kääntökoneissa ja dynaamisissa tasapainotusjärjestelmissä ovat perusteellisesti muuttaneet sitä, miten valmistajat lähestyvät drone-moottorien tuotolinjan tehokkuutta, mahdollistaen tiukkojen laatuvaatimusten täyttämisen samalla kun tuotantokapasiteettia parannetaan merkittävästi. Nämä innovaatiot ratkaisevat kriittisiä pullonkauloja, jotka ovat historiallisesti rajoittaneet tuotantokapasiteettia, erityisesti työvoimavaltaisia manuaalisia prosesseja ja laadullisia epäjohdonmukaisuuksia, joita liittyy perinteisiin valmistusmenetelmiin. Tarkkuusrobotiikan, reaaliaikaisen seurantajärjestelmän ja älykkäiden ohjausalgoritmien integrointi nykyaikaiseen tuotantolaitteistoon tarjoaa johdonmukaisuuden ja nopeuden, joita vaaditaan kilpailukyvyn säilyttämiseen nykyaikaisessa nopeassa markkinassa, samalla kun säilytetään ilmailuluokan komponenteille vaaditut tiukat toleranssit.
Edistyneet kääntötekniikat uudistavat moottorituotantoa
Tarkkuuslentäjän kääntöjärjestelmät ulkoroottorikonfiguraatioihin
Automaattisen lentävän kääntäjän teknologian käyttöönotto edustaa kvanttihyppäystä drone-moottorien tuotantolinjojen toiminnassa, erityisesti ulkoroottorisia tasavirtamoottoreita valmistettaessa, joilla on suurin osa nykyaikaisista moniroottorilentokoneista. Erikoistuneet neulakääntömenetelmät, jotka vaikeutuvat jännityksen tasa-arvon ja langan sijoittelun tarkkuuden saavuttamisesta, eroavat merkittävästi lentävän kääntäjän järjestelmistä, jotka käyttävät pyöriviä kärkiakseleita ja asettavat kuparilangan statorin ytimelle mikrometrin tarkkuudella. Tämä mekaaninen menetelmä varmistaa yhtenäisen kääntötiukkuuden kaikissa vaiheissa, mikä poistaa kuumat kohdat ja magneettiset epätasapainot, jotka voivat syntyä epätasaisesta kierrosmäisestä jakautumisesta. Lentävän kääntäjäpään pyörivä liike säilyttää luonnollisesti optimaalisen langan jännityksen koko kääntöprosessin ajan, estäen langan venymisen tai löystymisen, mikä heikentää moottorin suorituskykyä ja lyhentää sen käyttöikää.
Moderni kääntölaitteisto, joka on suunniteltu erityisesti dronemoottorien tuotantolinjoille, sisältää servomoottorilla ohjatut sijaintijärjestelmät, jotka koordinoivat useita liikeakseleita erinomaisen synkronoidusti. Kääntöpää seuraa ohjelmoitavia ratoja, jotka ottavat huomioon urageometrian, langan mittaluokan ja täyttötekijän vaatimukset, ja säätää automaattisesti nopeus- ja jännitysparametrejä integroitujen antureiden antaman reaaliaikaisen palautteen perusteella. Tämä sopeutuva ohjauskyky osoittautuu erityisen arvokkaaksi siirtyessä eri moottorimalleihin tai langan määrittelyihin, sillä käyttäjät voivat yksinkertaisesti ladata uudet kääntöohjelmat sen sijaan, että suoritettaisiin aikaa vieviä mekaanisia säätöjä. Tuloksena ovat merkittävät muutosajassa tapahtuvat vähennykset sekä kokeellisten asennusten poistaminen, jotka aiemmin kuluttivat tuntikausia tuotantoaikaan.
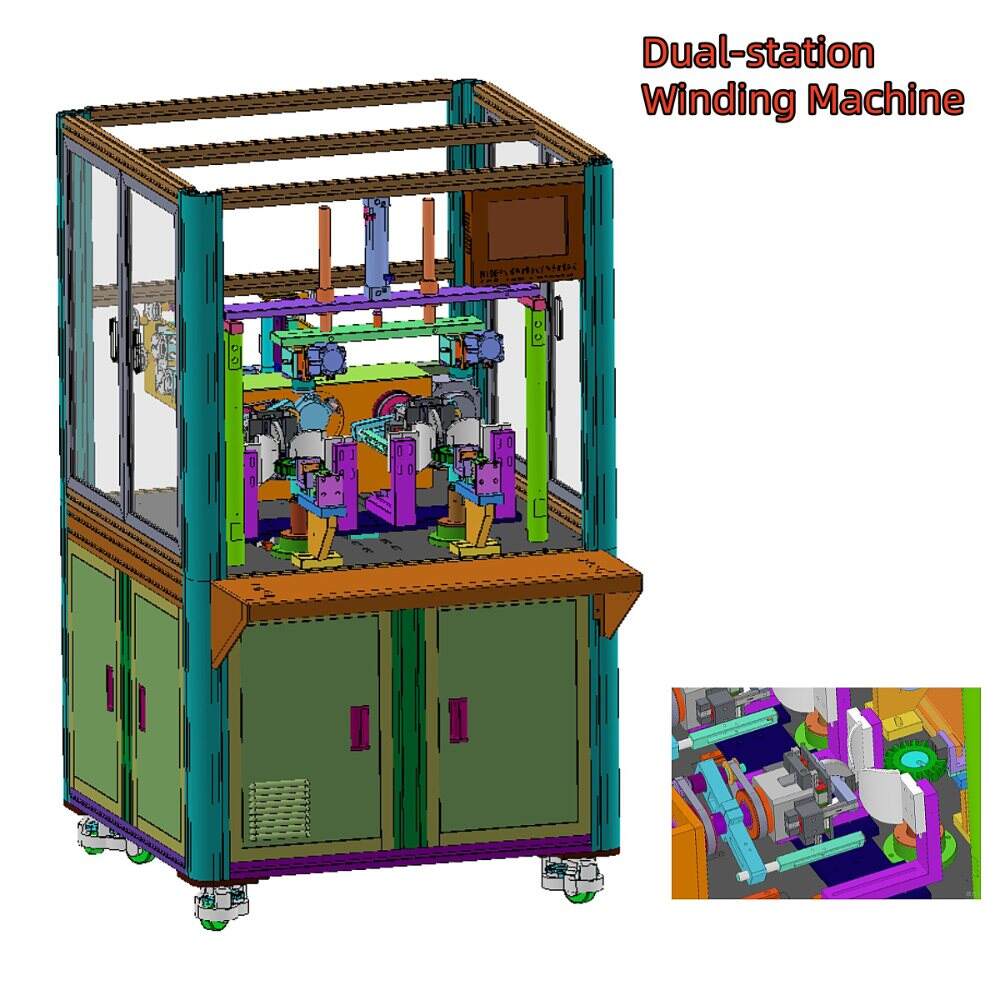
Kaksiasentoinen arkkitehtuuri jatkuvaa tuotantovirtaa varten
Kaksiasetusten käyttöönotto dronemoottorien tuotantolinjan laitteissa on noussut keskeiseksi strategiaksi laitteiston hyötykertoimen maksimoimiseksi ja lataus- ja purkutoimintojen aikana syntyvän odotusaikan vähentämiseksi. Tämä arkkitehtoninen lähestymistapa sijoittaa kaksi riippumatonta työaluetta yhden laitteen asennuspaikkaan, mikä mahdollistaa operaattoreiden valmistautumisen seuraavaan statorin kokoonpanoon samalla kun kääntöpää suorittaa työtä nykyisessä yksikössä. Heti kun yksi asetus saa päätökseen kääntöjaksonsansa, koneen ohjausjärjestelmä siirtää toiminnan saumattomasti toiseen asetukseen, luoden näin päällekkäisen työnkulun, joka tehokkaasti kaksinkertaistaa tuotantokapasiteetin verrattuna yksiasetusten vaihtoehtoihin. Kunkin yksikön kiertoaikaan tehtävät lyhennykset tulevat erityisen merkittäviksi suurten tuotantomäärien tilanteissa, joissa jopa pienet tehokkuusparannukset muuttuvat huomattaviksi kapasiteettiparannuksiksi.
Kaksiasemainen suunnittelufilosofia ulottuu yksinkertaisen tuottavuuden parantamisen yli mahdollistaen monitasoisemman laadunvalvonnan integroinnin dronemoottorien tuotantolinjan työnkulkuun. Valmistajat voivat omistaa yhden aseman erityisesti kääntötoimintoihin, kun taas toinen asema voidaan määrittää automatisoiduksi testaukseksi tai toissijaisiksi prosesseiksi, kuten johtimien päätteiden kiinnitykseksi ja eristekerroksen pinnoitukseksi. Tämä rinnakkaisenkäsittelyn mahdollisuus mahdollistaa laadun varmentamisen samanaikaisesti tuotannon kanssa, jolloin virheet havaitaan välittömästi eikä ongelmia löydettäisi vasta myöhempissä tuotantovaiheissa, joissa korjaustyön kustannukset kasvavat huomattavasti. Edistyneemmissä toteutuksissa käytetään näköjärjestelmiä ja sähköisiä testausmoduuleja, jotka varmentavat kääntöjen eheytetä ennen osien siirtämistä seuraaviin tuotantovaiheisiin, mikä muuttaa kääntökoneen yksinkertaisesta erikoistyökalusta laajanlaatuisen laadunvalvontaportin.
Langankäsittelyjärjestelmät, jotka poistavat jännityksen vaihteluvyöhykkeen
Johdon jännityksen yhtenäisen säilyttäminen koko kääntöprosessin ajan on yksi tärkeimmistä tekijöistä, jotka määrittävät moottorien suorituskyvyn yhtenäisyyden dronemoottorien tuotantolinjoilla. Jännityksen vaihtelut kääntöprosessin aikana aiheuttavat mitallisesti epäsäännölisyyksiä valmiissa käämissä, mikä johtaa paikallisesti puristuneisiin tai löysiin alueisiin, jotka ilmenevät magneettikentän epäsymmetrisyyyksinä moottorin toiminnan aikana. Nämä epäsymmetriat muuttuvat suoraan värinäksi, pienentävät hyötysuhdetta ja kiihdyttävät laakerien kulumista valmiissa dronemoottorissa. Tämän yhteyden tunnistaminen on ohjannut kehittäjiä suunnittelemaan monitasoisia johdon jännitysjärjestelmiä, jotka käyttävät suljettua säätöpiiriä jännityksen pitämiseen erinomaisen tiukkojen toleranssien sisällä riippumatta kelan halkaisijan muutoksista tai ympäristöolosuhteiden vaihteluista.
Aikakausmallisen dronimoottorien tuottilinjan laitteisto sisältää aktiivisen jännityksen säätömoduulit, jotka seuraavat jatkuvasti langan voimaa tarkkuuskuormakensojen avulla, jotka on sijoitettu langan kulkuun syöttökelkan ja kääntöpään välillä. Mikroprosessoripohjaiset ohjaimet vertaavat näitä reaaliaikaisia mittauksia ohjelmoituun asetusarvoon ja tekevät välittömiä säätöjä jännityksen hidastimen voimaan tai kapstaanimoottorin kierrosnopeuteen kompensoimaakseen havaittujen poikkeamien vaikutuksia. Tämä dynaaminen säätö on erityisen tärkeää, kun kierretään erinomaisen hienojakoisia magneettilankoja, joita käytetään mikromoottorisovelluksissa, sillä pienikin jännityksen piikki voi aiheuttaa langan katkeamisen ja riittämätön jännitys johtaa löysiin ja epäluotettaviin kierroksiin. Tuloksena on merkittävä parannus ensimmäisessä läpäisymäärässä sekä langaan liittyvien vikojen poistuminen, jotka ovat perinteisesti vaivanneet manuaalisia ja puoliautomaattisia kääntöprosesseja.
Dynaamisen tasapainottamisen integrointi prosessin aikaiseen laadunvarmistukseen
Ymmärtämisestä, miksi roottorin tasapaino on ratkaisevan tärkeää dronien suorituskyvylle
Droneihin käytettävien moottoreiden tasapainotusvaatimukset ovat huomattavasti tiukemmat kuin perinteisissä sähkömoottorisovelluksissa, koska brushless-ulko-rotorimoottoreissa moottorin roottori on mekaanisesti kytketty suoraan lentokoneen potkurin kanssa. Jo mikroskooppiset massan epätasapainot roottorikokoonpanossa aiheuttavat keskipakovoimia, joiden voimakkuus kasvaa pyörähtämisen kulmanopeuden neliöön verrannollisesti, mikä synnyttää värinöitä, jotka leviävät ilma-alustan läpi ja heikentävät lentovakautta, ohjaustarkkuutta ja hyötykuorman laatua. Ammattimaisissa elokuvadronien tai tarkan maatalouden UAV-lentokoneiden tapauksessa nämä värinät häiritsevät suoraan anturidataa ja vaarantavat tehtävän tavoitteet. Siksi valmistajien on saavutettava tasapainotus toleranssit, jotka mitataan milligramma-millimetreinä drone-moottorien tuotantolinjoilla, ja tämä edellyttää kehittyneitä mittaus- ja korjausmahdollisuuksia.
Perinteiset moottorien tasapainotusmenetelmät käsittelivät tätä toimintaa erillisenä kokoonpanon jälkeisenä prosessina, joka vaati usein erityisvarusteita ja koulutettuja teknikoita epätasapainovektorien tunnistamiseen sekä korjauspainojen manuaaliseen lisäämiseen tai poistamiseen. Tämä työnkulku aiheutti merkittäviä pullonkauloja drone-moottorien tuotantolinjan läpimenoaikojen suhteen ja lisäsi vaihtelua operaattorin taidon ja mittauslaitteiden kalibroinnin perusteella. Kääntötoimintojen ja tasapainotuksen välinen aikallinen erottelu tarkoitti myös sitä, että suunnittelusta johtuvat tasapaino-ongelmat tulivat ilmi vasta silloin, kun komponenttiin oli jo lisätty huomattavaa arvoa, mikä vaikeutti juurisyyn analysointia ja korjaavia toimenpiteitä sekä teki niistä kalliimpia. Nykyaikaiset tuotantofilosofiat tunnustavat, että tasapainotuskyvyn integroiminen suoraan kääntö- ja kokoonpanolinjaan parantaa merkittävästi sekä tehokkuutta että laatuvaatimuksia.
Automaattiset tasapainotusjärjestelmät reaaliaikaisella korjauksella
Edistyneiden dronemoottorien tuottilinjojen asetukset sisältävät nyt rinnakkaisia tasapainotusasemia, jotka mittaavat roottorikokoonpanon tasapainoa välittömästi kääntö- ja täyteoperaatioiden jälkeen, kun komponentit ovat edelleen kiinnitettyinä tarkasti ohjattuihin asentoihin. Nämä järjestelmät käyttävät korkeanopeuspyörivää akselia roottorikokoonpanon pyörittämiseen toimintanopeuksilla samalla kun kiihtyvyysanturiryhmät havaitsevat mahdollisen massatasapainottomuuden suuruuden ja kulma-asennon. Monitasoiset signaalinkäsittelyalgoritmit suodattavat pois ympäristön kohinaa ja koneen värinän merkintöjä erottaakseen todellisen roottorin tasapainottomuusvektorin erinomaisella tarkkuudella. Koko mittausjakso kestää sekunneissa, mikä tarjoaa välitöntä palautetta, joka mahdollistaa prosessin reaaliaikaiset säädöt eikä ainoastaan jälkikäteistä laatuanalyysiä.
Kun epätasapainon ominaisuudet on määritetty, automatisoidut korjausjärjestelmät soveltavat tarkkaa korjaustoimenpidettä useiden saatavilla olevien menetelmien avulla riippuen havaitun epätasapainon vakavuudesta ja luonteesta. Pienemmillä epäsymmetrioilla, jotka ovat sallittujen toleranssialueiden sisällä, järjestelmä voi yksinkertaisesti merkitä roottorin tiettyyn asentoon lopullisessa kokoonpanossa optimoidakseen moottori–potkuri -järjestelmän yhdistetyn tasapainon. Kohtalaiset epätasapainot käynnistävät automatisoidut materiaalin poistoprosessit, joissa käytetään laserkäyttöistä ablaatiota tai tarkkaa porausta poistamaan massaa laskettuina kulma-asennoina roottorikellon pinnalta. Vakavat epätasapainot, jotka ylittävät korjauskapasiteetin, ohjaavat komponentin automaattisesti hylkäysastioihin samalla kun laadunvalvontahenkilökuntaan ilmoitetaan mahdollisista prosessipoikkeamista tuotantolinjan edellisissä vaiheissa. Tämä suljetun silmukan lähestymistapa muuttaa tasapainottamisen korjaavasta toimenpiteestä ennakoivaksi laadunvalvontamekanismiksi dronemoottorien tuotantolinjan arkkitehtuurissa.
Tilastollinen prosessin ohjaus tasapainotustietojen analyysin avulla
Tasapainotusmittausjärjestelmien integrointi dronemoottorien tuotantolinjan laitteistoon tuottaa arvokkaita tietoja, jotka ulottuvat paljon pidemmälle kuin yksinkertainen hyväksytyt/hylätyt -laatutarkistus. Jokainen tasapainotusmittaus kuvaa tietoa kääntöjen säännöllisyydestä ja keskitteisyydestä, liimausaineen tasaisuudesta kotelointitoimenpiteiden aikana sekä roottorikellon geometrisesta tarkkuudesta. Kun tätä tietoa kerätään tuotantoerien yli ja sovelletaan tilastollisia prosessin ohjausmenetelmiä, valmistajat saavat ennennäkemättömän näkyvyyden prosessikykyyn ja prosessin poikkeamismalleihin, jotka jäisivät muuten huomaamatta ilman tällaista kattavaa mittausta.
Edistyneet valmistajat hyödyntävät tätä tasapainotustietoa ennakoivan huollon toteuttamiseen dronemoottorien tuotantolinjan laitteissa, tunnistamalla hienovaraisen heikkenemisen kääntöpään sijaintitarkkuudessa tai kiinnikkeiden kulumisessa ennen kuin nämä ongelmat aiheuttavat hylkäysosia. Suuntaviivatutkimusalgoritmit havaitsevat hitaita muutoksia keskimääräisessä epätasapainomäärässä tai epätasapainovektorien suuntajakauman muutoksia, antaen varhaisvaroituksen kehittyvistä ongelmista. Tämä ennakoiva lähestymistapa estää koko erien kalliin tuotannon ei-vaatimustenmukaisten osien osalta ja maksimoi laitteiden käytettävyyden tilapohjaisen, ei aikapohjaisen huollon suunnittelun avulla. Tasapainotusjärjestelmien muuttuminen laadunvalvontaporteiksi kattaviksi prosessin seurantatyökaluiksi edustaa perustavanlaatuista muutosta valmistusfilosofiassa, joka tuottaa kertyviä etuja useilla toiminnallisilla alueilla.
Automaatioarkkitehtuuri ja ohjausjärjestelmän integrointi
Ohjelmoitavat logiikkakontrollerit mahdollistavat joustavan tuotannon
Nykyajan dronemoottorien tuotantolinjan laitteiston ohjausjärjestelmän arkkitehtuuri perustuu teollisuuden käyttöön tarkoitettuihin ohjelmoitaviin logiikkakontrollereihin, jotka koordinoivat automatisoituja kääntö- ja tasapainotustoimintoja varten vaadittavia mekaanisia, sähköisiä ja pneumaattisia alajärjestelmiä. Nämä kontrollerit suorittavat reaaliaikaista koodia, joka synkronoi servomoottorien liikkeet, hallinnoi anturisyötteitä, koordinoi turvallisuuslukituksia sekä toteuttaa prosessireseptit, joissa määritellään kääntökuviot, jännitysparametrit ja laadun hyväksyntäkriteerit. Nykyaikaisten PLC:ien laskentateho ja deterministinen suorituskäyttäytyminen mahdollistavat millisekunnin alle kestävät vastausajat, jotka ovat olennaisia tarkkuuden säilyttämisessä korkean nopeuden kääntötoiminnoissa samalla kun hallitaan ihmisen ja koneen välistä käyttöliittymää sekä verkkoyhteyksiä tehdas-tasoisille järjestelmille.
Reseptipohjaiset ohjelmointiparadigmat ovat tulleet standardiksi dronemoottorien tuotantolinjojen ohjausjärjestelmissä, mikä mahdollistaa käyttäjien tallentaa satoja erilaisia moottorikonfiguraatioita erillisinä parametrijoukkoina, jotka voidaan kutsua välittömästi ilman insinöörien puuttumista. Jokainen resepti sisältää kaikki muuttujat, jotka määrittelevät tietyn moottorivariantin, mukaan lukien statorin mitat, loven lukumäärän, johtimen halkaisijan, kierrosten lukumäärän vaiheessa, kääntömallin topologian, jännityksen asetusarvot ja laatuvaatimusten sallitut poikkeamavälit. Tämä tietokannan perusteella toimiva lähestymistapa nopeuttaa tuotteen vaihtoa merkittävästi ja mahdollistaa sekamallituotantotaktiikat, joissa erilaiset moottorityypit kulkevat saman laitteiston läpi todellisen kysynnän mukaisesti. Manuaalisten asennusmenettelyjen poistaminen vähentää sekä vaihtoaikaan että ihmisen tekemien virheiden mahdollisuutta, mikä voisi vaarantaa tuotteen laadun tai vahingoittaa kalliita työkaluja.
Anturien integrointi suljetun silmukan prosessinohjaukseen
Modernin dronemoottorien tuotantolinjan laitteistoon on integroitu laaja anturiverkosto, joka seuraa jatkuvasti kriittisiä prosessimuuttujia ja tarjoaa takaisinkytkentäsignaalit suljetun silmukan säätöalgoritmeille. Langon jännityksen mittausanturit, asentoenkooderit, lämpötila-anturit ja näköjärjestelmät tuottavat reaaliaikaista tietoa, jota ohjaimet analysoivat poikkeamien havaitsemiseksi optimaalisista käyttöolosuhteista. Tämä anturipitoisessa ympäristössä voidaan käyttää sopeutuvia säätöstrategioita, jotka kompensoivat automaattisesti muuttujia, kuten ympäristön lämpötilan vaihteluita, jotka vaikuttavat langan kimmoisuuteen, työkalujen hitaata kulumista, joka muuttaa geometrisiä suhteita, tai syöttöjännitteen vaihteluita, jotka vaikuttavat servomoottorien suorituskykyyn. Siirtyminen avoimen silmukan ohjelmoituihin sekvensseihin suljetun silmukan sopeutuvaan säätöön edustaa perustavanlaatuista kyvykkyyden parannusta, joka vaikuttaa suoraan prosessin luotettavuuteen ja tuotteen yhdenmukaisuuteen.
Näköjärjestelmät ovat nousseet erityisen muuttaviksi antureiksi dronemoottorien tuotantolinjoilla, tarjoamalla ominaisuuksia, jotka ylittävät huomattavasti perinteiset rajakytkimet ja lähestymisanturit. Korkearesoluutioiset kamerat, joissa on erikoistettu valaistus ja kuvankäsittelyalgoritmit, varmistavat oikean johdon asennuksen, havaitsevat ristikkäiset tai vaurioituneet käämitykset, vahvistavat oikean johtimen sijoittelun ja mittaavat valmiin käämin mittasuureita. Nämä koskemattoman tarkastuksen mahdollisuudet toimivat tuotantonopeudella ilman lisäykseen tuotantokierroksen kestoa, mikä mahdollistaa kattavan laadunvarmistuksen jokaiselle tuotetulle yksikölle eikä pelkästään tilastollisen otantatarkastuksen eri erien joukosta. Kuvadata muodostaa myös pysyvän digitaalisen tallenteen jokaisen moottorin valmistusominaisuuksista, mikä mahdollistaa jäljitettävyysprotokollat, jotka ovat välttämättömiä ilmailu- ja lääketieteellisissä sovelluksissa, sekä helpottaa vian juurisyyn analysointia, kun kenttävirheitä ilmenee.
Teollinen yhteyskyky ja valmistuksen suoritussysteemin integrointi
Dronemoottorien tuotantolinjan laitteiden kehitys korostaa yhä enemmän yhteensopivuutta yritysten valmistuksen suoritussysteemien ja tehtaantoimintoja kattavien teollisten internetin asiat -alustojen kanssa. Nykyaikaiset kääntökoneet sisältävät Ethernet-liitännät, jotka tukevat teollisia protokollia, kuten OPC-UA:ta, MQTT:ta ja Modbus TCP:tä, ja mahdollistavat kaksisuuntaisen viestinnän korkeamman tason järjestelmien kanssa. Tämä yhteysarkkitehtuuri mahdollistaa tuotannon suunnittelijoiden etäkäyttöisen laitteiden määrittelyn tuotantosuunnitelmien ja reseptivalintojen avulla samalla kun ne poimivat reaaliaikaisia suorituskykyindikaattoreita, kuten kiertoaikoja, laadun hyötysuhteita, huoltovaroituksia ja energiankulutuksen mallipohjaisia tiedoja. Saatu tietonäkyvyys mahdollistaa tosiseikkoihin perustuvan päätöksenteon ja edistää monitasoisia analyysiä, joka paljastaa optimointimahdollisuuksia, joita ei voida havaita yksittäisen koneen tasolla.
Integrointi valmistuksen suoritustärkeiden järjestelmien kanssa muuttaa eristettyjä dronemoottorien tuotantolinjojen laitteita solmuiksi älykkäissä teollisuusverkoissa, joissa tiedot virtaavat saumattomasti suunnittelutekniikan, tuotannon suunnittelun, laadunvarmistuksen ja huollon osastojen välillä. Kun suunnittelutekniikka-asiantuntijat julkaisevat päivitettyjä moottorispesifikaatioita, muutokset leviävät automaattisesti tuotanto-ohjeisiin ilman manuaalista tietojen syöttöä, joka voisi aiheuttaa kirjoitusvirheitä. Laatujärjestelmät saavat välittömän ilmoituksen poikkeavista olosuhteista, mikä käynnistää automaattiset pidätysmenettelyt ja tutkintatyönkulut ennen kuin virheellistä tuotetta voidaan toimittaa asiakkaille. Huollon tiimit saavat ennakoivia varoituksia koneoppimisalgoritmien tuottamista, jotka analysoivat laitteiden suorituskyvyn kehitystä, mikä mahdollistaa puuttumisen ennen katastrofaalisia vikoja, jotka voisivat pysäyttää tuotannon. Tämä integraation taso edustaa teollisuuden 4.0 -käsitteiden käytännöllistä toteutumista tarkkuusmoottoreiden valmistuksen erityisalalla.
Toimintatason erinomaisuus prosessien optimoinnin kautta
Kiertoaikojen lyhentäminen ilman laadun vaarantamista
Dronejen moottorien tuotantolinjan toiminnassa yksikköä kohden laskettavan tuotantoaikaa on tasapainotettava huolellisesti laatuvaatimusten kanssa, sillä juuri laatu määrittää lopullisen tuotteen arvon ja asiakastyytyväisyyden. Liian kovaa syklausaikaan vaikuttamista, joka saavutetaan nostamalla kääntönopeuksia laitteiden kapasiteetin yläpuolelle tai vähentämällä tarkastusten tiukkuutta, osoittautuu vastatuottavaksi, kun aiheutuvat vianmäärät heikentävät kannattavuutta takuukustannusten ja maineen vahingoittumisen kautta. Kestäviä tehokkuusparannuksia saadaan systemaattisesta koko tuotantosyklin analyysistä, jolla tunnistetaan arvoa lisäämättömät odotusajat, tarpeeton liike sekä prosessivaiheet, jotka voidaan poistaa tai yhdistää ilman, että laatuun vaikutetaan. Aikatutkimusmenetelmät paljastavat, että todelliset arvoa lisäävät kääntö- ja tasapainotustoimet vievät usein vain murto-osan kokonaissyklausajasta, kun taas loput ajasta menetetään materiaalin käsittelyyn, jonotusaikaan ja manuaalisesti suoritettaviin varmistusvaiheisiin, jotka lendävät automatisoitaviksi.
Nopean työkalunvaihtojärjestelmien ja automatisoidun materiaalikäsittelyn toteuttaminen on yksi tehokkaimmista strategioista kiertoaikojen vähentämiseksi dronemoottorien tuotantolinjoilla. Nopeasti vaihdettavat kääntösuuttimet ja kiinnitysjärjestelmät mahdollistavat eri kokoisten moottorien valmistukseen tarvittavan laitteiston uudelleenkonfiguroinnin minuutteissa eivätkä tunteissa, mikä parantaa huomattavasti aikataulujen joustavuutta ja pienentää vaihto- ja säätötoimien kustannusten kannattavuuden varmistamiseen vaadittavia eräkokoja. Automatisoidut latausjärjestelmät, jotka ovat yhdistettyjä ylävirtaan sijaitsevaan komponenttivarastoon ja alavirtaan sijaitseviin kokoonpanotoimiin, poistavat manuaalisen osien käsittelyn, joka kuluttaa työntekijöiden aikaa ja lisää samalla komponenttien vaurioitumisen tai saastumisen riskiä. Yhteistyörobotit hoitavat yhä useammin toistuvia lataus- ja purku-tehtäviä, mikä mahdollistaa ihmistyöntekijöiden keskittymisen korkeamman arvon tehtäviin, kuten laadun tarkastukseen, laitteiden seurantaan ja jatkuvan parantamisen aloitteisiin. Nämä pienet, mutta kertyvät parannukset kasautuvat merkittäviksi kapasiteettivoitoiksi ilman lisätilan tai pääomallisen laiteinvestoinnin tarvetta.
Ensimmäisen kerran hyväksytyn tuotannon optimointi juurisyyjen poistamalla
Ensimmäisen kerran hyväksytyn tuotannon maksimointi on tehokkain keino parantaa dronemoottorien tuotantolinjan tehokkuutta, sillä jokainen virhe, joka vaatii uudelleenvalmistusta tai hylkäystä, kuluttaa materiaaleja, työvoimaa ja laitteiden aikaa tuottaen samalla nollatuloja. Perinteiset laatuohjelmat keskittyvät virheiden havaitsemiseen tarkastuksin, mutta tämä strategia vain määrittää ongelmien laajuutta ilman, että niiden taustasyitä käsitellään. Maailmanluokan valmistajat sen sijaan käyttävät systemaattisia juurisyyn analyysimenetelmiä, joilla jokainen virheluokka jäljitetään takaisin tiettyihin prosessimuuttujiin tai laitteiston olosuhteisiin, mikä mahdollistaa kohdennetut korjaavat toimet, jotka estävät virheiden toistumisen. Prosessitietojen tilastollinen korrelaatioanalyysi paljastaa yhteyksiä syöttömuuttujien ja laatuun liittyvien tulosten välillä, joita ei välttämättä huomata satunnaisella tarkastelulla, ja ohjaa insinöörejä kohti vaikutusvaltaisimpia parannusmahdollisuuksia.
Siirtyminen reaktiivisesta vikojen hallinnasta proaktiiviseen vikojen ehkäisyyn vaatii yhtä paljon kulttuurimuutoksia kuin teknisiä parannuksia dronemoottorien tuotantolinjan toiminnassa. Operaattoreita on valtuutettava ja koulutettava pysäyttämään tuotanto, kun ilmenee poikkeavia olosuhteita, eikä jatkettava kyseenalaisen laadun tuotteiden valmistamista erän valmistumiseen saakka. Laatupersonalin on päästävä käyttämään kattavaa prosessidataa ja analyysityökaluja, jotka mahdollistavat nopean laatuongelmien tutkimisen sen sijaan, että luottaisi anekdoottiseen näyttöön ja intuitioon. Johtamisjärjestelmien on tunnustettava ja palkittava tiimejä siitä, että ne tunnistavat ja ratkaisevat ongelmien juurisyyn, eikä rangaistava tilapäisiä tuotantokatkoja, jotka ovat välttämättömiä kestävien parannusten saavuttamiseksi. Organisaatiot, jotka onnistuvat tämän filosofisen muutoksen toteuttamisessa, saavuttavat johdonmukaisesti ensimmäisen läpimenon tuottavuuden yli 95 prosenttia, mikä muuttaa laadusta kustannuskeskuksen kilpailuetuksi, joka mahdollistaa korkeamman hinnoittelun ja etuoikeutetut asiakassuhteet.
Energiatehokkuuden ja kestävän kehityksen huomiointi
Nykyaikainen dronemoottorituotantolinja suunnittelu ottaa yhä enemmän huomioon energiatehokkuutta, mikä vähentää käyttökustannuksia samalla kun tuetaan yrityksen kestävyystavoitteita ja sääntelyvaatimuksia täyttäviä tavoitteita. Servomoottorien ohjaamat liikejärjestelmät korvaavat vanhemmat hydrauli- ja pneumatiikkatoimilaitteet, tarjoamalla vastaavan suorituskyvyn mutta kuluttamalla sähköenergiaa ainoastaan aktiivisen liikkeen aikana eikä jatkuvasti käynnissä olevia pumppuja ja kompressoreita käyttäen. Taajuusmuuttajat optimoivat moottorin toimintaa koko nopeusalueella, mikä poistaa energianhukkaa, joka on ominaista kiinteän nopeuden moottoreille, joita säädellään sulkuventtiileillä tai mekaanisilla vaihteistoilla. LED-valaistus ja tehokkaat lämmitysjärjestelmät vähentävät lisäksi teollisuuslaitoksen energiankulutusta, ja jotkin edistyneet asennukset sisältävät lämpötalteenottojärjestelmiä, jotka keräävät sähkökomponenttien hukkalämmön ja käyttävät sitä ilmanvaihdon tuloilman esilämmitykseen kylmän säätä varten.
Suoraan energiankulutukseen liittyvien toimintatapojen lisäksi kestävän drone-moottorituotantolinjan käytännöt käsittelevät materiaalijätettä parantamalla prosessin valvontaa, mikä vähentää jätteen syntymistä, sekä ottamalla käyttöön kierrätysjärjestelmiä kuparilangalle, pakkausmateriaaleille ja puhdistustoimenpiteissä käytetyille liuottimille. Ennakoiva huoltotaktiikka pidentää laitteiden käyttöikää ja vähentää ympäristövaikutuksia, jotka liittyvät suurten komponenttien aikaisempaan korvaamiseen. Jotkut valmistajat ovat saavuttaneet nollajätösstatus-maakäytön moottorituotannossaan kattavan jätteen erottelun ja erikoistuneiden kierrätyspalveluntarjoajien kanssa solmittujen kumppanuuksien avulla, jotka kykenevät käsittelyyn teollisuuden jätevirtoja. Nämä kestävyysaloitteet vaikuttavat yhä enemmän ostopäätöksiin, sillä dronetoimittajat kohtaavat omien asiakkaidensa paineen osoittaa ympäristövastuuta koko toimitusketjuunsa, mikä luo kilpailuetua moottoritoimittajille, jotka voivat esittää mitattavia kestävyysnäyttöjä.
Strategisen toteuttamisen harkinnat tuotantolinjojen päivityksissä
Kapasiteetin suunnittelu ja laajennettavuuden arviointi
Organisaatiot, jotka harkitsevat investointia edistyneisiin dronemoottorituotantolinja laitteiston on suoritettava tiukka kapasiteettianalyysi varmistaakseen, että ehdotetut järjestelmät vastaavat sekä nykyisiä tuotantomääriä että odotettuja kasvusuuntia. Liian pieni laitteisto aiheuttaa välittömiä pullonkauloja, jotka rajoittavat tuotantoa ja pakottavat kalliiden ylityöajan tai ulkoistamisen täyttämään asiakassitoumukset, kun taas liiallinen kapasiteetti sitoo pääomaa alakäytetyihin varoihin, jotka tuottavat riittämättömiä tuottoja sijoitetusta pääomasta. Tehokas kapasiteetinsuunnittelu sisältää kysyntäennusteen useissa skenaarioissa, ottaen huomioon sekä olemassa olevien asiakkaiden luonnollisen kasvun että mahdolliset uudet liiketoimintamahdollisuudet, joissa saattaa vaadita erilaisia moottorikonfiguraatioita tai laatuvaatimuksia. Analyysin on myös otettava huomioon kausittaiset kysyntämallit, uusien tuotteiden esittelyjaksoja sekä varakapasiteetin strateginen merkitys odottamattomien mahdollisuuksien tai kilpailijoiden toimitusketjuun vaikuttavien häiriöiden varalta.
Laajennettavuuden huomioon ottaminen ulottuu alun perin laitteiston kapasiteetin yli kattamaan myös arkkitehtonisen joustavuuden, joka on välttämätön tulevaisuudessa tapahtuvaa laajentumista varten ilman toiminnan keskeytystä tai olemassa olevien investointien vanhentumista. Modulaariset laitteistosuunnittelut, jotka mahdollistavat kapasiteetin lisäämisen kääntöpäiden tai työasemien lisäämisellä, tarjoavat kustannustehokkaammat kasvupolut kuin monoliittiset järjestelmät, joita joudutaan kokonaan vaihtamaan tuotantomäärien kasvaessa. Tilojen suunnittelussa on varattava tilaa laitteiden lisäyksille samalla kun varmistetaan, että hyötyverkot – kuten sähkövirta, puristettu ilma ja verkkoyhteys – pystyvät tukemaan laajennettuja konfiguraatioita. Ohjelmistosuunnittelun on mahdollistettava lisälaitteiden integrointi ilman, että koko järjestelmän uusiminen tai monimutkaiset siirtoprojektit olisivat tarpeen. Organisaatiot, jotka ottavat nämä laajennettavuusperiaatteet huomioon jo alussa tehtävissä investointipäätöksissä, ovat paremmin asemissa vastaamaan tehokkaasti markkinamahdollisuuksiin ja minimoimaan laitteiston elinkaaren kokonaisomistuskustannukset.
Työntekijäkoulutus ja muutoshallinta
Monimutkaisen dronemoottorien tuottilinjan automaation onnistunut käyttöönotto edellyttää laajaa työvoiman kehittämisohjelmaa, joka rakentaa teknisiä taitoja, joita tarvitaan monimutkaisten mekaatronisten järjestelmien käyttöön, huoltoon ja optimointiin. Perinteiset moottorien kääntämiseen liittyvät taidot, jotka perustuvat manuaaliseen taitavuuteen ja mekaaniseen intuitioon, siirtyvät vaatimuksiksi, jotka koskevat tietokoneosaamista, vianetsintämenetelmiä sekä anturien, toimilaitteiden ja ohjausjärjestelmien ymmärtämistä. Organisaatioiden on sijoitettava rakennettuihin koulutusohjelmiin, jotka kehittävät näitä osaamisia luokkaopetuksen, valmistajan tarjoaman laitteistokoulutuksen ja ohjatun käytännön kokemuksen yhdistelmän avulla. Tehokkaimmat ohjelmat tunnustavat, että käyttäjillä on arvokasta prosessitietoa, joka tulisi ottaa huomioon automaation toteuttamisessa eikä sen pitäisi syrjäyttää sitä, mikä luo yhteistyöllisiä ympäristöjä, joissa ihmisen asiantuntemus ja koneen kyvyt täydentävät toisiaan eivätkä kilpaile keskenään.
Muutoshallintaprotokollat ovat yhtä tärkeitä teknologian käyttöönoton menestykselle kuin tekniset ratkaisut itse, sillä vastustus tuntemattomia järjestelmiä kohtaan voi heikentää jopa teknisesti hyvin perusteltuja automaatiohankkeita. Johtamisen tehtävänä on selittää selvästi tuotantolinjan modernisoinnin strateginen perusta ja samalla ottaa huomioon työvoiman huolenaiheet työpaikkojen turvallisuudesta ja roolimuutoksista. Tuotantolinjan käyttäjien ja teknikoiden osallistaminen laitteiden määrittelyyn ja hyväksyntätestaukseen edistää omistajuuden kehittämistä ja mahdollistaa eturivin tietojen hyödyntämisen, mikä parantaa käyttöönoton tuloksia. Vaiheittaiset käyttöönottostrategiat, joissa automaatio otetaan käyttöön asteittain eikä häiriöllisinä kokonaan uusittavina ratkaisuina, mahdollistavat organisaation kykyjen kehittämisen vaiheittain samalla kun tuotannon jatkuvuus säilyy. Tunnuksia ja palkintoja jakavat ohjelmat, jotka korostavat varhaisia käyttäjiä ja nopeita oppijoita, luovat positiivista vauhtia ja vertaistukea, mikä kiihdyttää koko organisaation sopeutumista uusiin työtapaan. Yritykset, jotka noudattavat näitä ihmiskeskeisiä muutoshallintakäytäntöjä johdonmukaisesti, saavuttavat nopeammin täyden tuottavuuden ja saavuttavat korkeamman lopullisen suorituskyvyn automaatioinvestointeistaan.
Toimittajan valinta ja kumppanuussuhteiden kehittäminen
Päätös investoida edistyneen dronimoottorituotantolinjan laitteisiin edustaa pitkäaikaista sitoutumista teknologiapartneriin, jonka kyvyt, reagointikyky ja liiketoiminnallinen vakaus vaikuttavat merkittävästi toiminnallisesti menestykseen vuosien ajan alun perin asennettujen laitteiden jälkeen. Laajat toimittajien arviointiprosessit arvioivat paitsi laitteiden teknisiä eritelmiä ja hintoja myös muita tekijöitä, kuten sovellusinsinööripalvelun tarjoamista, varaosien saatavuutta, ohjelmistopäivityspolitiikkoja ja kenttäpalveluverkon kattavuutta. Viitteet nykyisiltä asiakkailta antavat tietoa todellisesta suorituskyvystä ja tuen laadusta, jota markkinointimateriaalit eivät välttämättä täysin paljasta. Taloudellisen vakauden analyysi varmistaa, että toimittaja pysyy elinkelpoisena ja pystyy tukemaan laitteita niiden taloudellisen elinkaaren ajan, mikä estää kalliit ongelmat, jotka voivat syntyä, kun toimittajat lopettavat toimintansa tai poistavat tuotelinjansa käytöstä.
Onnistuneimmat toteutukset kehittävät toimittajasuhteita yksinkertaisen laiteostosten tasolta strategisiksi kumppanuuksiksi, joissa molemmat osapuolet panostavat yhteiseen menestykseen. Yhteistyössä toimivat toimittajat tarjoavat sovellusinsinööripalveluita, joiden avulla koneiden konfiguraatiot optimoidaan tiettyihin moottorimalleihin ja tuotantovaatimuksiin eikä ainoastaan tarjota standardisia katalogiratkaisuja. He osallistuvat jatkuvan parantamisen aloitteisiin, analysoivat tuotantodataa parannustarpeiden tunnistamiseksi ja ottavat asiakaspalaute huomioon tuotekehityksen kehityssuunnitelmassa. Joustavat kaupallisratkaisut – kuten suoritusperusteiset maksuehdot, varaosien tilausvarastojärjestelmät ja koulutustuki – osoittavat toimittajan luottamusta omaan laitteistoonsa ja sen sitoutumista asiakkaan menestykseen. Organisaatiot, jotka kasvattavat tällaisia strategisia suhteita, saavat pääsyn innovaatio- ja teknisiin kykyihin, jotka ulottuvat paljon laajemmalle kuin niiden sisäiset resurssit, mikä luo kestäviä kilpailuetuja nopeasti kehittyvässä dronemoottorimarkkinoilla.
UKK
Millä tuotantomäärällä on perustetta investoida automatisoituun dronemoottorien kääntö- ja tasapainotuslaitteistoon?
Automatisoidun dronemoottorituotantolinjan laitteiston taloudellinen perustelu syntyy yleensä, kun vuosituotanto ylittää 50 000 yksikköä, vaikka tarkka kriittinen piste riippuu työvoimakustannuksista, tuotteen sekamäisyydestä ja laatuvaatimuksista. Organisaatiot, jotka tuottavat useita eri moottorivariantteja, hyötyvät automaatiosta pienemmillä tuotantomäärillä, koska vaihtoaika lyhenee ja tulokset ovat johdonmukaisempia verrattuna manuaalisiiin prosesseihin. Laskelmassa on otettava huomioon kokonaisomistuskustannukset, mukaan lukien laitteiston hankinta, asennus, koulutus ja huolto, sekä näiden vastapainona saadut työvoimakustannusten säästöt, laadun parantuminen ja kapasiteetin kasvu odotetun laitteiston elinkaaren aikana, joka on seitsemän–kymmenen vuotta.
Kuinka automatisoidut tasapainotusjärjestelmät vertautuvat perinteisiin manuaalisesti suoritettuihin tasapainotuksiin tarkkuuden ja käsittelynopeuden kannalta?
Automaattiset rivi-integroidut tasapainotusjärjestelmät, jotka on integroitu dronemoottorien tuotantolinjoihin, saavuttavat jäännösepätasapainotasot alle 0,5 gramma-millimetrin käsittelyaikojen ollessa alle kolmekymmentä sekuntia per yksikkö, kun taas manuaalinen tasapainotus vaatii tyypillisesti kaksi–viisi minuuttia per yksikkö ja johtaa jäännösepätasapainotasoihin yhdestä kaikkiin kahdeksi gramma-millimetriksi riippuen operaattorin taidoista. Automaattinen menetelmä poistaa myös subjektiivisen mittauksen tulkinnan ja tarjoaa täydellisen dokumentoinnin jokaisesta testatusta yksiköstä, mikä tukee jäljitettävyysvaatimuksia ilmailu- ja lääketieteellisissä sovelluksissa. Automaattisen tasapainotuksen yhdenmukaisuus osoittautuu erityisen arvokkaaksi suorituskykyerojen poistamisessa yksiköiden välillä, mikä puolestaan vähentää asiakaspalautteita ja takuukustannuksia korkean suorituskyvyn dronessovelluksissa.
Mitkä huoltovaatimukset valmistajien tulisi odottaa automaattisille kääntölaitteille?
Modernin dronemoottorien tuotantolinjan laitteiston ennakoiva huolto vaatii huoltovälejä, jotka vaihtelevat viikoittaisista kulumiskohteiden, kuten kääntösuuttimien ja langanohjausten, tarkastuksista neljännesvuosittaiseen mekaanisten järjestelmien voiteluun ja vuosittaiseen anturien ja mittalaitteiden kalibrointiin. Edistyneisiin koneisiin rakennetut ennakoivan huollon toiminnallisuudet seuraavat komponenttien kuntoa ja varoittavat huoltohenkilökuntaa kehittyvistä ongelmista ennen vikojen syntymistä, mikä siirtää huoltotaktiikkaa aikapohjaisesta tilapohjaiseen aikataulutukseen. Organisaatioiden tulisi budjetoida laitteiston hankintakustannuksista noin viisi–kahdeksan prosenttia vuosittain huollon kattamiseksi, mukaan lukien varaosat, kulutusmateriaalit ja kalibrointipalvelut, samalla kun varmistetaan, että tekninen henkilökunta saa riittävän koulutuksen suorittamaan rutinomaisia huoltotehtäviä ja perustason vianetsintää ilman, että jokaisessa pienessä ongelmassa tarvitaan valmistajan tukea.
Voivatko olemassa olevat manuaaliset tai puoliautomaattiset tuotantolinjat päivittää vaiheittain sen sijaan, että niiden täydellinen korvaaminen vaaditaan?
Monet valmistajat toteuttavat onnistuneesti vaiheittaisia modernisointistrategioita, joissa automaatiokykyjä otetaan vaiheittain käyttöön olemassa olevilla dronemoottorien tuotantolinjoilla sen sijaan, että toimivien laitteiden kokonaan uusiutuminen vaadittaisiin. Tyypillisiä päivityspolkuja ovat esimerkiksi manuaalisten kääntökoneiden varustaminen ohjelmoitavilla jännityksen säätöjärjestelmillä, kääntövirheiden havaitsemiseksi lisättävien tarkastusasemien (näköpohjaiset tarkastukset) asentaminen tai olemassa olevien laitteiden kanssa yhteensopivien automaattisten latausjärjestelmien käyttöönotto. Tekninen toteuttamismahdollisuus ja taloudellinen perustelu vaiheittaisille päivityksille verrattuna täydelliseen korvaamiseen riippuvat olemassa olevien laitteiden iästä ja kunnosta, valmistajien tarjoamien päivityspakettien ja integraatiotuen saatavuudesta sekä siitä, voivatko nykyiset konearkkitehtuurit ottaa vastaan modernit ohjausjärjestelmät ja anturiteknologiat ilman perusteellista uudelleensuunnittelua.
Sisällysluettelo
- Edistyneet kääntötekniikat uudistavat moottorituotantoa
- Dynaamisen tasapainottamisen integrointi prosessin aikaiseen laadunvarmistukseen
- Automaatioarkkitehtuuri ja ohjausjärjestelmän integrointi
- Toimintatason erinomaisuus prosessien optimoinnin kautta
- Strategisen toteuttamisen harkinnat tuotantolinjojen päivityksissä
-
UKK
- Millä tuotantomäärällä on perustetta investoida automatisoituun dronemoottorien kääntö- ja tasapainotuslaitteistoon?
- Kuinka automatisoidut tasapainotusjärjestelmät vertautuvat perinteisiin manuaalisesti suoritettuihin tasapainotuksiin tarkkuuden ja käsittelynopeuden kannalta?
- Mitkä huoltovaatimukset valmistajien tulisi odottaa automaattisille kääntölaitteille?
- Voivatko olemassa olevat manuaaliset tai puoliautomaattiset tuotantolinjat päivittää vaiheittain sen sijaan, että niiden täydellinen korvaaminen vaaditaan?