
Den raske utvidelsen av dronemarkedet har skapt utenomordentlige krav til mikro-børsteløse motorer med høy ytelse, noe som driver produsenter mot å søke avanserte automatiseringsløsninger som kan levere konsekvent kvalitet i stor skala. Moderne dronemotorprodusentlinje systemer må oppnå ekstraordinær presisjon i viklingsoperasjoner samtidig som de opprettholder de nøyaktige balansekravene som direkte påvirker flytestabilitet og energieffektivitet. Ettersom kommersielle og industrielle dronetilpassninger spres over sektorer fra landbruk til logistikk, øker presset på motorprodusenter til å optimere produksjonsarbeidsflyter, redusere syklustider og eliminere variasjoner som kan svekke ytelsen i krevende driftsmiljøer.
Nylige teknologiske gjennombrudd innen automatiserte viklingsmaskiner og dynamiske balanseringssystemer har grunnleggende forandret hvordan produsenter tilnærmer seg effektiviteten i produksjonslinjer for drone-motorer, og gjør det mulig å oppfylle strenge kvalitetskrav samtidig som produksjonshastigheten forbedres betydelig. Disse innovasjonene løser de kritiske flaskehalsene som historisk har begrenset produksjonskapasiteten, spesielt de arbeidskrevende manuelle prosessene og kvalitetsvariasjonene knyttet til tradisjonelle fremstillingsmetoder. Ved å integrere presisjonsrobotikk, sanntidsövervakningssystemer og intelligente styringsalgoritmer gir moderne produksjonsutstyr den konsekvensen og hastigheten som er nødvendig for å konkurrere på dagens raskt skiftende marked, samtidig som de stramme toleransene som kreves for luft- og romfartsgraderte komponenter opprettholdes.
Avanserte viklingsteknologier som revolusjonerer motorproduksjon
Presisjonsviklingssystemer for ytre rotor-konfigurasjoner
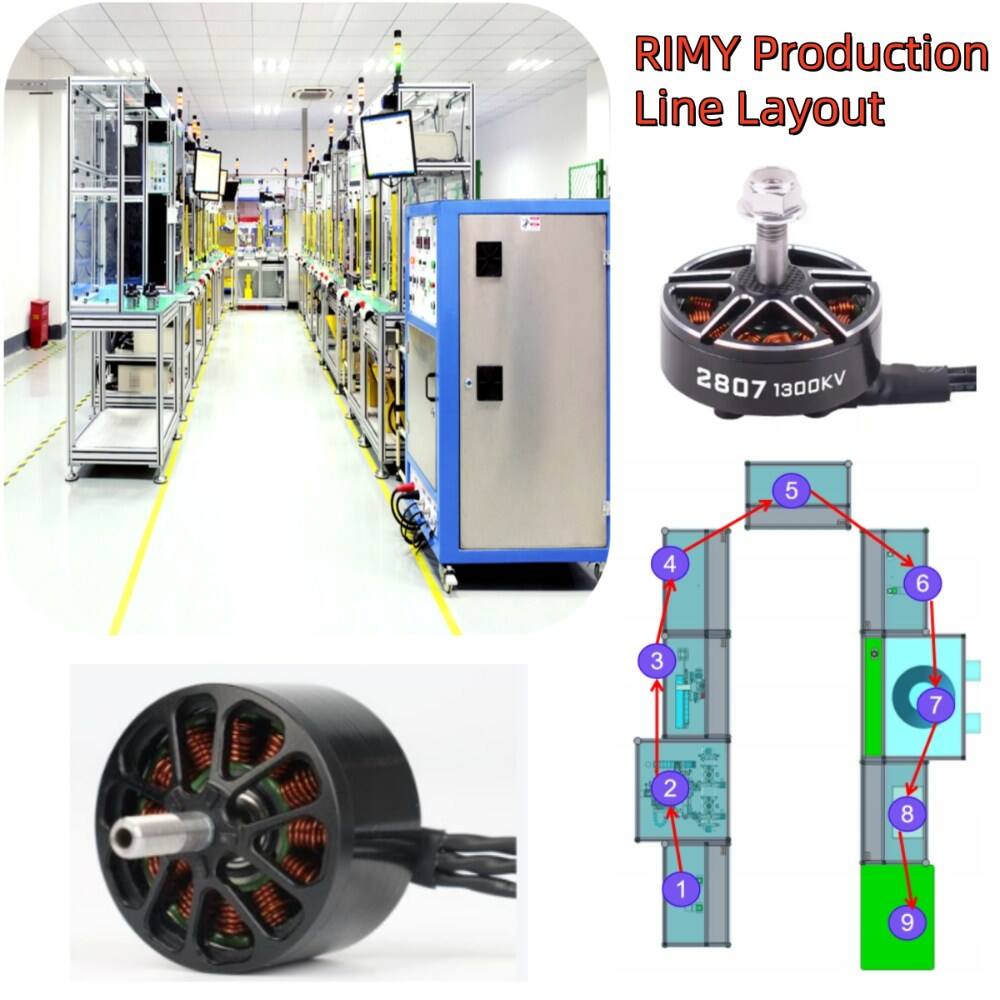
Innføringen av automatisk flyer-viklingsteknologi representerer et kvantehopp fremover for dronedriftsproduksjonslinjer, spesielt ved produksjon av ytre rotor-løse likestrømsmotorer som driver majoriteten av moderne multikoptere. I motsetning til konvensjonelle nål-viklingsmetoder som sliter med konsistent spenning og nøyaktig trådposisjonering, bruker flyer-viklingssystemer roterende aksler som legger kobbertråd på statorkjerner med mikrometer-nøyaktighet. Denne mekaniske metoden sikrer jevn vikletetthet over alle faser og eliminerer varmeområder og magnetiske ubalanser som kan oppstå på grunn av uregelmessig viklingfordeling. Rotasjonsbevegelsen til flyer-hodet holder naturlig optimal trådspenning gjennom hele viklingsprosessen og forhindrer strekking eller løsning av tråden, noe som ellers svekker motorprestasjonen og reduserer levetiden.
Moderne viklingsutstyr for flygere designet spesifikt for bruksområder i produksjonslinjer for drone-motorer inneholder servodrevne posisjoneringssystemer som koordinerer bevegelse langs flere akser med eksepsjonell synkronisering. Viklingshodet følger programmerbare baner som tar hensyn til spallegeometri, tråddiameterkrav og fyllfaktorkrav, og justerer automatisk hastighet og spenningsparametre basert på sanntidsdata fra integrerte sensorer. Denne adaptive styringsfunksjonen viser seg spesielt verdifull ved overgang mellom ulike motordesign eller trådspesifikasjoner, da operatører enkelt kan laste inn nye viklingsrecepter i stedet for å utføre tidkrevende mekaniske justeringer. Resultatet er betydelige reduksjoner i omstillings- og byttetid samt eliminering av prøve-og-feil-innstillingsprosedyrer som tidligere brukte timer av produksjonstid.
Dobbelstasjonsarkitektur for kontinuerlig produksjonsflyt
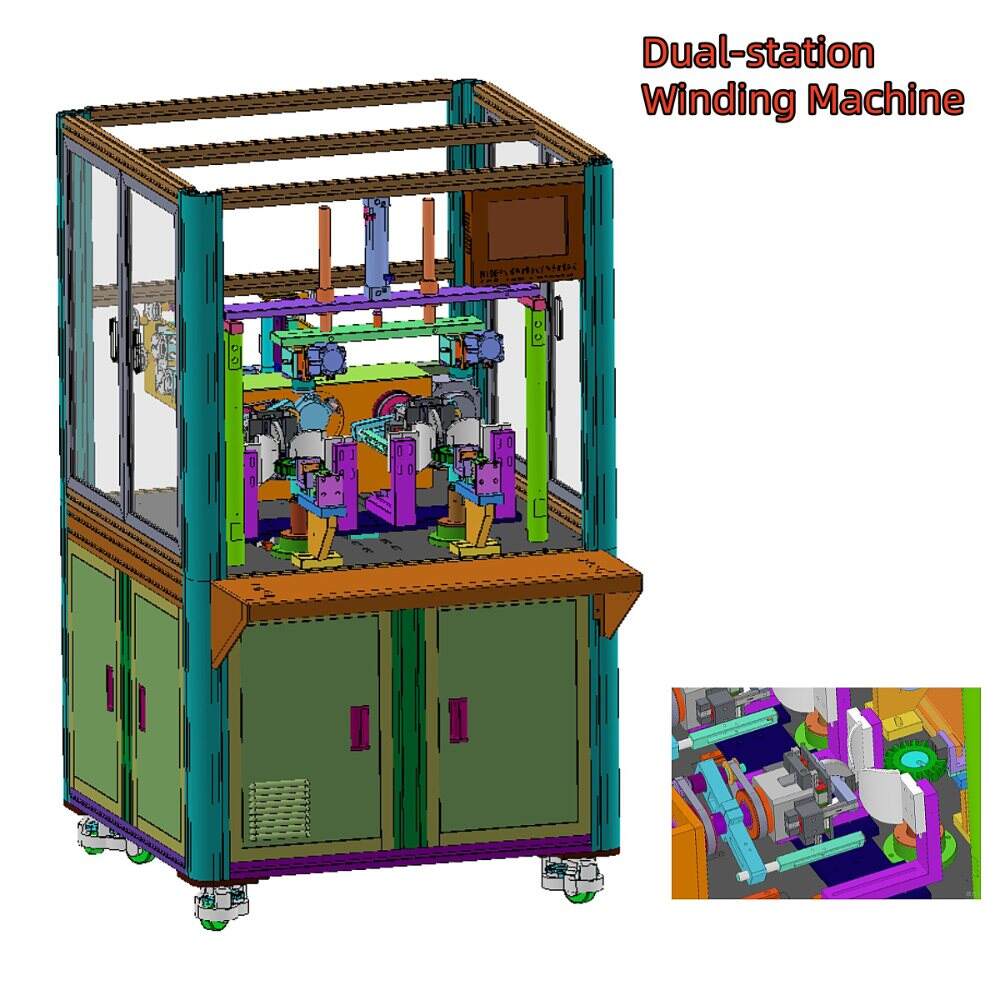
Implementering av dobbeltstasjonskonfigurasjoner i utstyr for dronemotorproduksjonslinjer har vist seg å være en avgjørende strategi for å maksimere utstyrets utnyttelse og minimere inaktiv tid under lasting- og lossingsoperasjoner. Denne arkitektoniske tilnærmingen plasserer to uavhengige arbeidsområder innenfor et enkelt maskinrom, slik at operatører kan forberede neste statormontering mens viklingshodet fullfører arbeidet på den nåværende enheten. Så snart én stasjon fullfører sin viklingscyklus, overfører maskinstyresystemet uten problemer drift til den andre stasjonen, noe som skaper en overlappende arbeidsflyt som effektivt dobler produksjonskapasiteten i forhold til alternativer med én stasjon. Reduksjonen i syklustid per enhet blir spesielt betydelig i produksjonsscenarier med høy volumproduksjon, der selv marginale effektivitetsgevinster fører til betydelige kapasitetsforbedringer.
Filosofien bak tostasjonsdesignet går ut over enkle produktivitetsgevinster ved å muliggjøre en mer sofistikert integrering av kvalitetskontroll i arbeidsflyten for produksjon av drone-motorer. Produsenter kan dedisere én stasjon utelukkende til viklingsoperasjoner, mens den andre konfigureres for automatisk testing eller sekundære prosesser som ledningsterminering og isolasjonsbelægning. Denne muligheten for parallell behandling gjør det mulig å foreta kvalitetsverifikasjon samtidig med produksjonen, slik at feil oppdages umiddelbart i stedet for at problemer oppdages i senere faser av produksjonen, der kostnadene for omforming øker betydelig. Avanserte implementeringer inkluderer visjonssystemer og elektriske testmoduler som bekrefter viklingsintegriteten før deler frigis til påfølgende produksjonsfaser, noe som effektivt transformerer viklemaskinen til en omfattende kvalitetsport i stedet for et verktøy med én enkelt funksjon.
Trådhåndteringssystemer som eliminerer spenningsvariasjon
Å opprettholde konstant trådspenning gjennom hele viklingsprosessen er en av de mest kritiske faktorene som bestemmer konsekvensen i motorytelse i produksjonslinjen for dronemotorer. Variasjoner i spenningen under viklingen fører til dimensjonelle uregelmessigheter i den ferdige spolen, noe som skaper lokale områder med kompresjon eller løsning som kommer til syne som asymmetrier i det magnetiske feltet under motordrift. Disse asymmetriene fører direkte til vibrasjoner, redusert virkningsgrad og akselerert lagerdrift i den ferdige dronemotoren. Innsikten i denne sammenhengen har drevet utviklingen av sofistikerte trådspenningsreguleringssystemer som bruker lukket-loop-styring for å opprettholde spenningen innenfor ekstremt smale toleranser, uavhengig av endringer i rulle-diameter eller miljømessige svingninger.
Moderne produksjonslinjeutstyr for drone-motorer integrerer aktive spennkontrollmoduler som kontinuerlig overvåker trådkraften gjennom presisjonsbelastningsceller plassert i trådbanen mellom spoleforsyningen og viklingshodet. Mikroprosessorbaserte kontrollere sammenligner disse sanntidsmålingene med forhåndsprogrammerte referanseverdier og justerer øyeblikkelig bremsespennkraften eller hastigheten til kapstanmotoren for å kompensere for eventuelle avvik som oppdages. Denne dynamiske reguleringen er avgjørende ved vikling med ekstremt tynne magnettråder, som ofte brukes i mikromotorapplikasjoner, der selv minimale spennspisser kan føre til trådbrudd, mens utilstrekkelig spenning gir løse og upålitelige viklinger. Resultatet er en bemerkelsesverdig forbedring av første-gang-utbyttet og utryddelse av trådrelaterte feil som tradisjonelt har plaget manuelle og halvautomatiske viklingsoperasjoner.
Integrering av dynamisk balansering for kvalitetssikring under prosessen
Forståelsen av rotorens kritiske rolle for dronens ytelse
Balanseringskravene for dronemotorer er langt strengere enn for konvensjonelle elektriske motorapplikasjoner, på grunn av den direkte mekaniske koblingen mellom motorrotorene og luftfartøyets propeller i børsteløse «outrunner»-konfigurasjoner. Selv mikroskopiske masseasymmetrier i rotoroppsettet genererer sentrifugalkrefter som øker med kvadratet av rotasjonshastigheten, noe som skaper vibrasjoner som spre seg gjennom luftfartøyets ramme og svekker flytestabiliteten, kontrollnøyaktigheten og lastkvaliteten. I profesjonelle kameradroner eller UAV-er for nøyaktig landbruk påvirker disse vibrasjonene direkte sensordataene og kompromitterer oppgålsmålene. Produsenter må derfor oppnå balansetoleranser målt i milligram-millimeter i sine dronemotorprodusksjonsprosesser – standarder som krever sofistikerte måle- og korreksjonsmuligheter.
Tradisjonelle tilnærminger til motorbalansering behandlet denne operasjonen som en separat prosess etter montering, ofte med behov for spesialisert utstyr og fagkyndige teknikere for å identifisere ubalansvektorer og manuelt legge til eller fjerne korreksjonsvekter. Denne arbeidsflyten skapte betydelige flaskehalser i produksjonslinjen for drone-motorer, samtidig som den introduserte variasjon basert på operatørens teknikk og kalibrering av måleutstyr. Den tidsmessige adskillelsen mellom viklingsoperasjoner og balansering betydde også at balanserelaterte designproblemer først ble synlige etter at betydelig verdi allerede var lagt til komponenten, noe som gjorde rotårsaksanalyse og korrigerende tiltak mer komplisert og kostbar. Moderne produksjonsfilosofier erkjenner at integrering av balanseringsfunksjonalitet direkte i viklings- og monteringslinjen betydelig forbedrer både effektiviteten og kvalitetsresultatene.
Automatiserte balanseringssystemer med sanntidskorrigering
Avanserte konfigurasjoner av dronemotorprodusert linjer inkluderer nå inline-balanseringsstasjoner som måler balansen til rotormontasjen umiddelbart etter vikling og inngjutningsoperasjoner, mens komponentene fortsatt er festet i nøyaktig kontrollerte stillinger. Disse systemene bruker høyhastighetsaksler for å rotere rotormontasjen med driftshastigheter, mens akselerometerarrayer registrerer størrelsen og vinkelposisjonen til eventuelle masseubalanser. Avanserte signalbehandlingsalgoritmer filtrerer bort miljøstøy og maskinvibrasjonsmønstre for å isolere den reelle rotormasseubalansen med eksepsjonell nøyaktighet. Hele målesyklusen fullføres på sekunder og gir umiddelbar tilbakemelding som muliggjør justeringer i sanntid i stedet for etterfaktisk kvalitetsanalyse.
Når ubalansens egenskaper er kvantifisert, bruker automatiserte korreksjonssystemer nøyaktige tiltak gjennom flere tilgjengelige teknikker, avhengig av alvorlighetsgraden og arten av den oppdagede ubalansen. For små asymmetrier innenfor akseptable toleranseområder kan systemet enkelt markere rotoren for en spesifikk orientering under endelig montering for å optimere den samlede balansen i motor-propell-systemet. Moderat ubalanse utløser automatiserte prosesser for fjerning av materiale ved hjelp av laserablasjon eller presis boremaskin for å selektivt redusere massen på beregnede vinkelposisjoner på rotorklokken. Alvorlig ubalanse som ligger utenfor korreksjonskapasiteten sender komponenten automatisk til avvisningsbokser, samtidig som kvalitetspersonell varsles om mulige avvik i tidligere prosesser. Denne lukkede-løkken-tilnærmingen transformerer balansering fra en korrigerende operasjon til en prediktiv kvalitetskontrollmekanisme innenfor arkitekturen til dronemotorproduksjonslinjen.
Statistisk prosesskontroll gjennom balanseringsdataanalyse
Integrasjonen av balanseringsmålesystemer i dronemotorprodusentens produksjonslinje genererer verdifulle datasett som går langt utover enkel kvalitetsverifikasjon basert på godkjent/ikke-godkjent. Hver balanseringsmåling fanger opp informasjon om konsistensen og sentreringen av viklingsmønstre, jevnheten i limfordelingen under potting-operasjoner og den geometriske nøyaktigheten til rotorbell-produksjonen. Ved å samle inn disse dataene over flere produksjonsløp og anvende metoder for statistisk prosesskontroll får produsenter en uten sidestykke innsikt i prosesskapasitet og driftsmønstre som ellers ville vært usynlige uten en slik omfattende måling.
Fremtidsrettede produsenter utnytter disse balanseringsdataene til å implementere forutsigende vedlikeholdsprotokoller for utstyret på sine dronemotorprodusksjonslinjer, og identifiserer subtile nedbrytningsfenomener i nøyaktigheten til viklingshodets posisjonering eller slitasje på fester før slike problemer fører til avfall. Algoritmer for trendanalyse oppdager gradvise endringer i gjennomsnittlig ubalansstørrelse eller endringer i retningsspredningen til ubalansvektorene, og gir tidlig advarsel om problemer som er under utvikling. Denne proaktive tilnærmingen forhindrer kostbare produksjoner av hele partier med ikke-samsvarende deler, samtidig som den maksimerer utstyrets driftstid gjennom vedlikehold basert på tilstand, snarare enn vedlikehold basert på tidsintervaller. Omforming av balanseringssystemer fra kvalitetskontrollpunkter til omfattende prosessovervåkningsverktøy representerer en grunnleggende endring i produksjonsfilosofien, som gir kumulative fordeler over flere operative dimensjoner.
Automatiseringsarkitektur og integrasjon av kontrollsystem
Programmerbare logikkontrollere som muliggjør fleksibel produksjon
Arkitekturen til kontrollsystemet som ligger til grunn for moderne utstyr for dronemotorproduksjonslinjer bygger på industrielle programmerbare logikkontrollere (PLC-er) som styrer den komplekse samordningen av mekaniske, elektriske og pneumatiske delsystemer som kreves for automatiserte viklings- og balanseringsoperasjoner. Disse kontrollerne utfører sanntidskode som synkroniserer bevegelser til servomotorer, håndterer innganger fra sensorer, koordinerer sikkerhetsinterlåser og implementerer prosessreceptene som definerer viklingsmønstre, spenningsparametre og kvalitetsakseptkriterier. Den beregningskraften og de deterministiske kjøreegenskapene til moderne PLC-er gjør det mulig med responstider på under én millisekund, noe som er avgjørende for å opprettholde presisjon under høyhastighetsviklingsoperasjoner, samtidig som de håndterer visningene på menneske-maskin-grensesnittet og nettverkskommunikasjonen med fabrikknivåsystemer.
Programmeringsparadigmer basert på oppskrifter har blitt standard i kontrollsystemer for dronedreiemotorer, og lar operatører lagre hundrevis av ulike motorkonfigurasjoner som separate parametersetninger som kan hentes fram øyeblikkelig uten behov for ingeniørintervensjon. Hver oppskrift omfatter alle variablene som definerer en bestemt motortype, inkludert statordimensjoner, antall spoler, ledertverrsnitt, vindingstall per fase, vindingmønster-topologi, spenningsinnstillinger og kvalitetstoleranseområder. Denne databasebaserte tilnærmingen akselererer produktbytter betydelig og muliggjør produksjon av flere modeller samtidig, der ulike motortyper går gjennom samme utstyr basert på sanntidsforespørsler fra markedet. Elimineringen av manuelle innstillingsprosedyrer reduserer både byttetid og risikoen for menneskelige feil som kan påvirke produktkvaliteten eller skade dyrt verktøy.
Sensorintegrasjon for lukket-loop-prosesskontroll
Utstyr for moderne dronemotorprodusentlinjer inneholder omfattende sensornettverk som kontinuerlig overvåker kritiske prosessvariabler og gir tilbakekoplingsignalene som er nødvendige for algoritmer for lukket-loop-styring. Trådspenningsmålere, posisjonsenkodere, temperatursensorer og visjonssystemer genererer strømmer av sanntidsdata som styringsenhetene analyserer for å oppdage avvik fra optimale driftsforhold. Denne sensortette miljøet muliggjør adaptive styringsstrategier som automatisk kompenserer for variabler som endringer i omgivelsestemperaturen som påvirker trådens elastisitet, gradvis verktøyslitasje som endrer geometriske forhold eller svingninger i spenningsforsyningen som påvirker servomotorens ytelse. Overgangen fra åpne loop-programmerede sekvenser til lukkede loop-adaptive styring representerer en grunnleggende kapasitetsoppgradering som direkte påvirker prosessens robusthet og produktets konsekvens.
Synssystemer har vist seg å være spesielt omformingsskapende sensorer i produksjonslinjer for drone-motorer, og gir funksjonalitet som går langt utover tradisjonelle grenseswitcher og nærhetssensorer. Høyoppløselige kameraer utstyrt med spesialisert belysning og bildebehandlingsalgoritmer verifiserer riktig ledningsføring, oppdager krysset eller skadet viklinger, bekrefter riktig plassering av tilkoblingsledninger og måler dimensjonelle egenskaper til den ferdige spolen. Disse berøringsfrie inspeksjonsmulighetene opererer ved produksjonshastigheten uten å øke syklustiden, og integrerer dermed omfattende kvalitetsverifikasjon i hver enkelt produserte enhet i stedet for å stole på statistisk utvalg fra partier. Bilddataene skaper også en permanent digital registrering av hver motors produksjonskarakteristika, noe som muliggjør sporbarhetsprotokoller som er avgjørende for luft- og romfart samt medisinske applikasjoner, samtidig som det forenkler å finne rotårsaken ved feil som oppstår i bruk.
Industriell tilkobling og integrasjon av produksjonseksekveringssystem
Utviklingen av utstyr for dronemotorproduksjonslinjer legger økende vekt på tilkobling til bedrifters produksjonseksekveringssystemer og industrielle Internett-av-tingen-plattformer som samler inn data fra hele fabrikksdriften. Moderne viklemaskiner inneholder Ethernet-grensesnitt som støtter industrielle protokoller som OPC-UA, MQTT og Modbus TCP, og som muliggjør toveis-kommunikasjon med systemer på høyere nivå. Denne tilkoblingsarkitekturen gir produksjonsplanleggere mulighet til å konfigurere utstyret fjernstyrt med produksjonsplaner og valg av prosessparametere, samtidig som de kan hente ut sanntidsytelsesdata, inkludert syklustider, kvalitetsutbytte, vedlikeholdsvarsler og energiforbruksmønstre. Den resulterende datatilgjengeligheten støtter beslutninger basert på fakta og muliggjør sofistikerte analyser som avdekker optimaliseringsmuligheter som ikke er synlige på enkeltmaskinnivå.
Integrasjon med produksjonsutføringssystemer transformerer isolerte utstyrslinjer for drone-motorer til noder i intelligente fabrikknettverk, der informasjon strømmer sømløst mellom designingeniører, produksjonsplanlegging, kvalitetssikring og vedlikeholdsavdelinger. Når designingeniører frigir oppdaterte motorspesifikasjoner, overføres endringene automatisk til produksjonsrecepter uten behov for manuell inntasting som kan føre til transkripsjonsfeil. Kvalitetssystemer mottar øyeblikkelig varsling om avvik fra spesifikasjoner, noe som utløser automatiske stopp-prosedyrer og etterforskningsarbeidsflyter før ikke-konforme produkter kan leveres til kunder. Vedlikeholdsgrupper får tilgang til prediktive varsler som genereres av maskinlæringsalgoritmer som analyserer utstyrets ytelsestrender, slik at inngrep kan foretas før katastrofale svikter stopper produksjonen. Dette integrasjonsnivået representerer den praktiske realiseringen av Industry 4.0-konsepter innen det spesialiserte området for presisjonsmotorproduksjon.
Operasjonell utmerkelse gjennom prosessoptimering
Reduksjon av syklustid uten kompromiss når det gjelder kvalitet
Nødvendigheten av å redusere produksjonstiden per enhet i produksjonslinjen for drone-motorer må nøye balanseres mot kvalitetskravene som til slutt avgjør produktverdien og kundetilfredsheten. Aggressiv reduksjon av syklustiden ved å øke viklehastighetene utover utstyrets kapasitet eller redusere strengheten i inspeksjoner viser seg å være kontraproduktiv når det resulterende defektnivået svekker lønnsomheten gjennom garantikostnader og skade på omdømmet. Bærekraftige effektivitetsforbedringer oppnås gjennom systematisk analyse av hele produksjonsprosessen for å identifisere ventetider som ikke legger til verdi, unødvendig bevegelse og prosesssteg som kan elimineres eller kombineres uten å påvirke kvalitetsresultatene. Tidsstudiemetodikk avslører at de faktiske verdi-tilleggende operasjonene for vikling og balansering ofte bare tar en brøkdel av den totale syklustiden, mens resten går tapt på grunn av materialehåndtering, køtid og manuelle verifikasjonssteg som kan automatiseres.
Implementering av rask-verktøybyttesystemer og automatisert materialehåndtering representerer en av de mest effektive strategiene for reduksjon av sykeltid i produksjonslinjer for drone-motorer. Vindingsdyser og feste-systemer med rask utveksling gjør at operatører kan omkonfigurere utstyr for ulike motorstørrelser på få minutter i stedet for timer, noe som betydelig forbedrer planleggingsfleksibiliteten og reduserer de partistørrelsene som er nødvendige for å rettferdiggjøre omstillingskostnadene. Automatiserte lastesystemer som integreres med oppstrømskomponentlager og nedstrømsmonteringsoperasjoner eliminerer manuell håndtering av deler, som både tar tid fra operatørene og skaper muligheter for skade eller forurensning av komponenter. Samarbeidsroboter (cobots) utfører i økende grad repetitive laste- og lossoppgaver, slik at menneskelige operatører kan konsentrere seg om verdiskapende aktiviteter som kvalitetsverifikasjon, overvåking av utstyr og initiativer for kontinuerlig forbedring. Den samlede effekten av disse gradvise forbedringene forsterkes gjensidig og fører til betydelige kapasitetsgevinster uten at det kreves ekstra fabrikkgulvareal eller investeringer i nytt kapitalutstyr.
Optimalisering av første-gang-utbytte gjennom eliminering av underliggende årsaker
Å maksimere første-gang-utbytte representerer den kraftigste måten å forbedre effektiviteten i produksjonslinjen for dronemotorer på, siden hver feil som krever omproduksjon eller kassering forbruker materialer, arbeidskraft og utstyrs tid, samtidig som den ikke genererer inntekter. Tradisjonelle kvalitetsmetoder fokuserer på å oppdage feil gjennom inspeksjon, men denne strategien kvantifiserer bare problemene uten å ta opp de underliggende årsakene. Verdensledende produsenter implementerer i stedet systematiske metoder for analyse av underliggende årsaker, som sporer hver feilkategori tilbake til spesifikke prosessvariabler eller utstyrstilstander, noe som muliggjør målrettede korrektive tiltak som forhindrer gjentakelse. Statistisk korrelasjonsanalyse av prosessdata avslører sammenhenger mellom inngangsvariabler og kvalitetsresultater som ikke nødvendigvis er tydelige ved tilfeldig observasjon, og veileder ingeniører mot de mest effektive forbedringsmulighetene.
Overgangen fra reaktiv feilhåndtering til proaktiv feilforebygging krever like mye kulturelle endringer som tekniske forbedringer i dronemotorprodusentens produksjonslinje. Operatører må få myndighet og opplæring til å stanse produksjonen når unormale forhold oppstår, i stedet for å fortsette å produsere tvilsomme enheter inntil batchen er fullført. Kvalitetspersonell må ha tilgang til omfattende prosessdata og analytiske verktøy som muliggjør rask etterforskning av kvalitetshendelser, i stedet for å basere seg på anekdotisk evidens og intuisjon. Ledelsessystemer må anerkjenne og belønne team for identifisering og løsning av grunnsakene, i stedet for å straffe midlertidige produksjonsavbrot som er nødvendige for varige forbedringer. Organisasjoner som vellykket implementerer disse filosofiske endringene oppnår konsekvent første-gang-utbytte på over femogniitti prosent, og transformerer kvalitet fra en kostnadsavdeling til en konkurransedyktig fordel som muliggjør premiumpriser og foretrukne kundeforhold.
Hensyn til energieffektivitet og bærekraft
Moderne dronemotorprodusentlinje designen inkluderer i økende grad hensyn til energieffektivitet, noe som reduserer driftskostnadene samtidig som det støtter bedriftens forpliktelser innen bærekraft og målene for overholdelse av reguleringer. Servodrevne bevegelsessystemer erstatter eldre hydrauliske og pneumatiske aktuatorer og leverer tilsvarende ytelse mens de bare forbruker strøm under aktiv bevegelse, i stedet for å kjøre pumpene og kompressorene kontinuerlig. Variabelfrekvensomformere optimaliserer motordrift over hele hastighetsområdet og eliminerer den energispenningen som er innebygd i fasthastighetsmotorer som styres via innsnevring eller mekaniske overføringsmekanismer. LED-belysning og effektive oppvarmingssystemer reduserer ytterligere energiforbruket i anlegget, og noen av de mest avanserte installasjonene inkluderer varmegjenvinningsystemer som fanger opp avfallsvarme fra elektriske komponenter for å forvarme innstrømmende ventilasjonsluft under drift i kaldt vær.
Utenfor direkte energiforbruk adresserer bærekraftige produksjonslinjer for drone-motorer materiellavfall gjennom forbedret prosesskontroll som reduserer avfallsproduksjon og implementerer resirkuleringssystemer for kobbertråd, emballasjematerialer og løsningsmidler brukt i rengjøringsoperasjoner. Forutsigende vedlikeholdsstrategier utvider utstyrets levetid og reduserer den miljøpåvirkningen som er knyttet til tidlig utskifting av store komponenter. Noen produsenter har oppnådd null-avfallsdeponeringsstatus for sine motorproduksjonsdriftsaktiviteter gjennom omfattende avfallsseparering og samarbeid med spesialiserte resirkuleringsleverandører som kan behandle industrielle avfallsstrømmer. Disse bærekraftinitiativene påvirker i økende grad kjøpsbeslutninger, ettersom droneprodusenter står under press fra sine egne kunder om å vise miljøansvar gjennom hele sine leveranskjeder, noe som skaper konkurransefordeler for motorleverandører som demonstrerer målbare bærekraftige resultater.
Strategiske implementeringshensyn for oppgradering av produksjonslinjer
Kapasitetsplanlegging og skalbarhetsvurdering
Organisasjoner som vurderer investering i avanserte dronemotorprodusentlinje utstyret må gjennomføre en streng kapasitetsanalyse for å sikre at de foreslåtte systemene er i tråd med både gjeldende volumkrav og forventede vekstforløp. For lite utstyr skaper umiddelbare flaskehalser som begrenser produksjonen og tvinger til dyre overtidsarbeid eller utsetting av arbeid for å oppfylle kundeforpliktelser, mens for stort utstyr binder kapital i underutnyttede aktiva som gir utilstrekkelige avkastninger på investeringene. Effektiv kapasitetsplanlegging inkluderer etterspørselsprognoser for flere scenarier, og tar hensyn til både organisk vekst fra eksisterende kunder og potensielle nye forretningsmuligheter som kan kreve ulike motorkonfigurasjoner eller kvalitetsstandarder. Analysen må også ta hensyn til sesongbetonte etterspørselsmønstre, sykluser for lansering av nye produkter og den strategiske betydningen av å vedlikeholde reservekapasitet for uventede muligheter eller forstyrrelser i leveranskjeden hos konkurrenter.
Vurderinger av skalerbarhet går ut over den opprinnelige utstyrskapasiteten og omfatter den arkitektoniske fleksibiliteten som er nødvendig for å tilpasse seg fremtidig utvidelse uten å forstyrre pågående drift eller gjøre eksisterende investeringer foreldet. Modulære utstyrsdesign som tillater kapasitetsøkning ved tilleggsmontering av viklingshoder eller arbeidsstasjoner gir mer kostnadseffektive vekstmuligheter enn monolittiske systemer som krever fullstendig utskifting når volumene øker. Anleggsplasseringen bør reservere plass for utstyrstillegg, samtidig som det sikres at hjelpefunksjonene – inkludert elektrisk kraft, komprimert luft og nettverkskobling – kan støtte utvidede konfigurasjoner. Programvarearkitekturer må kunne håndtere integrering av ekstra maskiner uten å kreve fullstendig utskifting av systemet eller komplekse migreringsprosjekter. Organisasjoner som integrerer disse prinsippene for skalerbarhet i sine første investeringsbeslutninger, plasserer seg bedre til å reagere effektivt på markedsmuligheter samtidig som de minimerer den totale eierkostnaden gjennom hele utstyrets levetid.
Opplæring av arbeidsstokk og endringsledelse
Den vellykkede implementeringen av automatisering av sofistikerte dronemotorprodusentlinjer krever omfattende arbeidskraftutviklingsprogrammer som bygger opp de tekniske kompetansene som er nødvendige for å drifte, vedlikeholde og optimalisere komplekse mekatroniske systemer. Tradisjonelle ferdigheter innen motorvikling som bygger på manuell ferdighet og mekanisk intuisjon gir vei for krav om dataskilldighet, metoder for feilsøking samt forståelse av sensorer, aktuatorer og styringssystemer. Organisasjoner må investere i strukturerte opplæringslæreplaner som utvikler disse kompetansene gjennom en kombinasjon av undervisning i klasserom, utstyrstrening levert av leverandører og veiledet praktisk erfaring. De mest effektive programmene erkjenner at operatører besitter verdifull prosesskunnskap som bør bidra til implementeringen av automatisering, snarere enn å bli erstattet av den, og skaper dermed samarbeidsorienterte miljøer der menneskelig ekspertise og maskinkapasitet komplementerer – i stedet for å konkurrere med – hverandre.
Endringsstyringsprotokoller viser seg like viktige for suksessen til teknologideployering, da motstand mot ukjente systemer kan undergrave selv teknisk solide automatiseringsprosjekter. Ledelse må tydelig kommunisere den strategiske begrunnelsen for modernisering av produksjonslinjer, samtidig som man tar opp arbeidstakeres bekymringer angående jobbsikkerhet og endringer i roller. Å involvere operatører og teknikere i prosessene for utstyrsspesifikasjon og aksepttest gir eierskap og fanger opp innsikt fra frontlinjen, noe som forbedrer implementeringsresultatene. Trinnvise deployeringsstrategier som innfører automatisering gradvis i stedet for gjennom forstyrrende helhetlige erstatninger, lar organisasjoner utvikle kompetanse progresivt samtidig som produksjonskontinuiteten opprettholdes. Anerkjennelsesprogrammer som feirer tidlige brukere og rasklærte skaper positiv drivkraft og jevnaldrende-innflytelse, noe som akselererer hele organisasjonens tilpasning til nye arbeidsmetoder. Selskaper som konsekvent utfører disse menneskesentrerte endringsstyringspraksisene oppnår raskere tid til full produktivitet og høyere endelige ytelsesnivåer fra sine automatiseringsinvesteringer.
Utvalg av leverandør og utvikling av partnerskap
Beslutningen om å investere i avansert utstyr for produksjonslinje for drone-motorer representerer en langsiktig forpliktelse overfor en teknologipartner hvis evner, responsivitet og økonomisk stabilitet vil påvirke driftenes suksess betydelig i mange år etter den første installasjonen. Omfattende leverandørvurderingsprosesser vurderer ikke bare utstyrets spesifikasjoner og priser, men også faktorer som applikasjonsingeniørstøtte, tilgjengelighet av reservedeler, politikk for programvareoppdateringer og dekning av felttjenestenettverk. Referansesjekker med eksisterende kunder gir innsikt i virkelig ytelse og kvaliteten på støtten – informasjon som markedsføringsmateriale ikke nødvendigvis avslører fullt ut. Analyse av finansiell stabilitet sikrer at leverandøren vil forbli driftsdyktig og dermed kunne støtte utstyret gjennom hele dets økonomiske levetid, og unngå de kostbare komplikasjonene som oppstår når leverandører legger ned virksomheten eller trekker ut produktlinjer.
De mest vellykkede implementeringene utvikler leverandørsamarbeidet utover transaksjonelle utstyrsinnkjøp til strategiske partnerskap som kjennetegnes av gjensidig investering i felles suksess. Samarbeidende leverandører tilbyr applikasjonsingeniørressurser som optimaliserer maskinkonfigurasjoner for spesifikke motordesign og produksjonskrav, i stedet for å bare tilby standardløsninger fra katalogen. De deltar i kontinuerlige forbedringsinitiativer, analyserer produksjonsdata for å identifisere muligheter for forbedring og integrerer kundetilbakemeldinger i produktutviklingsveien. Fleksible kommersielle avtaler – inkludert ytelsesbaserte betalingsvilkår, reservdelskonsignasjonsprogrammer og opplæringsstøtte – demonstrerer leverandørens tillit til sitt utstyr og tilknytning til kundens suksess. Organisasjoner som bygger opp slike strategiske relasjoner får tilgang til innovasjonskanaler og tekniske evner som strekker seg langt forbi deres interne ressurser, noe som skaper bærekraftige konkurransefordeler på den raskt utviklende dronemotormarkedet.
Ofte stilte spørsmål
Hvilken produksjonsvolum rettferdiggjør investering i automatisert utstyr for vikling og balansering av drone-motorer?
Den økonomiske rettferdiggjørelsen for automatisert utstyr for drone-motorproduksjonslinjer oppstår vanligvis ved produksjonsvolum som overstiger 50 000 enheter årlig, selv om det spesifikke break-even-punktet avhenger av lønnskostnader, kompleksiteten i produktblandingen og kvalitetskravene. Organisasjoner som produserer flere motorvarianter drar nytte av automatisering allerede ved lavere volumer på grunn av redusert omstillings tid og forbedret konsekvens sammenlignet med manuelle prosesser. Beregningen bør ta hensyn til totalkostnaden for eierskap, inkludert utstyrsanskaffelse, installasjon, opplæring og vedlikehold, i forhold til besparelser på arbeidskraft, forbedringer i kvalitet og økt kapasitet over den forventede levetiden til utstyret, som er syv til ti år.
Hvordan sammenlignes automatiserte balanseringssystemer med tradisjonell manuell balansering når det gjelder nøyaktighet og gjennomstrømning?
Automatiserte inline-balanseringssystemer integrert i konfigurasjonene av dronemotorprodusentlinjer oppnår restbalanseringsnivåer under 0,5 gram-millimeter, mens enheter behandles med syklustider på under tretti sekunder, i forhold til manuell balansering som vanligvis krever to til fem minutter per enhet med en restbalansering på én til to gram-millimeter avhengig av operatørens ferdigheter. Den automatiserte metoden eliminerer også subjektiv tolkning av målinger og gir full dokumentasjon for hver testet enhet, noe som støtter sporbarehetskravene innen luftfart og medisinske applikasjoner. Konsekvensen i automatisert balansering viser seg spesielt verdifull for å eliminere ytelsesvariasjon mellom enheter, noe som fører til kundeklager og garantikostnader i høytytende dronemotorapplikasjoner.
Hvilke vedlikeholdsbehov bør produsenter forvente for automatiserte viklingsutstyr?
Moderne produksjonslinjeutstyr for drone-motorer krever forebyggende vedlikehold med intervaller som varierer fra ukentlige inspeksjoner av slitasjedeler som viklingsdyser og trådførere til kvartalsvis smøring av mekaniske systemer og årlig kalibrering av sensorer og måleutstyr. Forutsigende vedlikeholdsfunksjoner som er integrert i avanserte maskiner overvåker komponentenes tilstand og varsler vedlikeholdsansatte om pågående problemer før feil oppstår, noe som endrer vedlikeholdsstrategien fra tidbasert til tilstandsbestemt planlegging. Organisasjoner bør sette av ca. fem til åtte prosent av utstyrets anskaffelseskostnad hvert år til vedlikehold, inkludert reservedeler, forbruksgoder og kalibreringstjenester, samtidig som det sikres at teknisk personell får tilstrekkelig opplæring for å utføre rutinemessige vedlikeholdstasker og grunnleggende feilsøking uten å være avhengig av leverandørens støtte ved hver mindre feil.
Kan eksisterende manuelle eller delvis automatiserte produksjonslinjer oppgraderes gradvis i stedet for å kreve fullstendig utskiftning?
Mange produsenter implementerer vellykket trinnvise moderniseringsstrategier som gradvis innfører automatiseringsfunksjoner i eksisterende produksjonslinjer for dronemotorer, i stedet for å kreve total utskiftning av fungerende utstyr. Vanlige oppgraderingsveier inkluderer ettermontering av programmerbare spennkontrollsystemer på manuelle viklemaskiner, tilleggsmontering av visjonsinspeksjonsstasjoner for oppdagelse av viklefeil eller innføring av automatiserte lastesystemer som kobles til eksisterende utstyr. Den tekniske gjennomførbarheten og den økonomiske begrunnelsen for gradvise oppgraderinger i forhold til fullstendig utskiftning avhenger av alderen og tilstanden til eksisterende utstyr, tilgjengeligheten av ettermonteringssett og integreringsstøtte fra leverandører, samt om dagens maskinarkitekturer kan tilpasse moderne styresystemer og sensorteknologier uten grunnleggende omdesign.
Innholdsfortegnelse
- Avanserte viklingsteknologier som revolusjonerer motorproduksjon
- Integrering av dynamisk balansering for kvalitetssikring under prosessen
- Automatiseringsarkitektur og integrasjon av kontrollsystem
- Operasjonell utmerkelse gjennom prosessoptimering
- Strategiske implementeringshensyn for oppgradering av produksjonslinjer
-
Ofte stilte spørsmål
- Hvilken produksjonsvolum rettferdiggjør investering i automatisert utstyr for vikling og balansering av drone-motorer?
- Hvordan sammenlignes automatiserte balanseringssystemer med tradisjonell manuell balansering når det gjelder nøyaktighet og gjennomstrømning?
- Hvilke vedlikeholdsbehov bør produsenter forvente for automatiserte viklingsutstyr?
- Kan eksisterende manuelle eller delvis automatiserte produksjonslinjer oppgraderes gradvis i stedet for å kreve fullstendig utskiftning?