
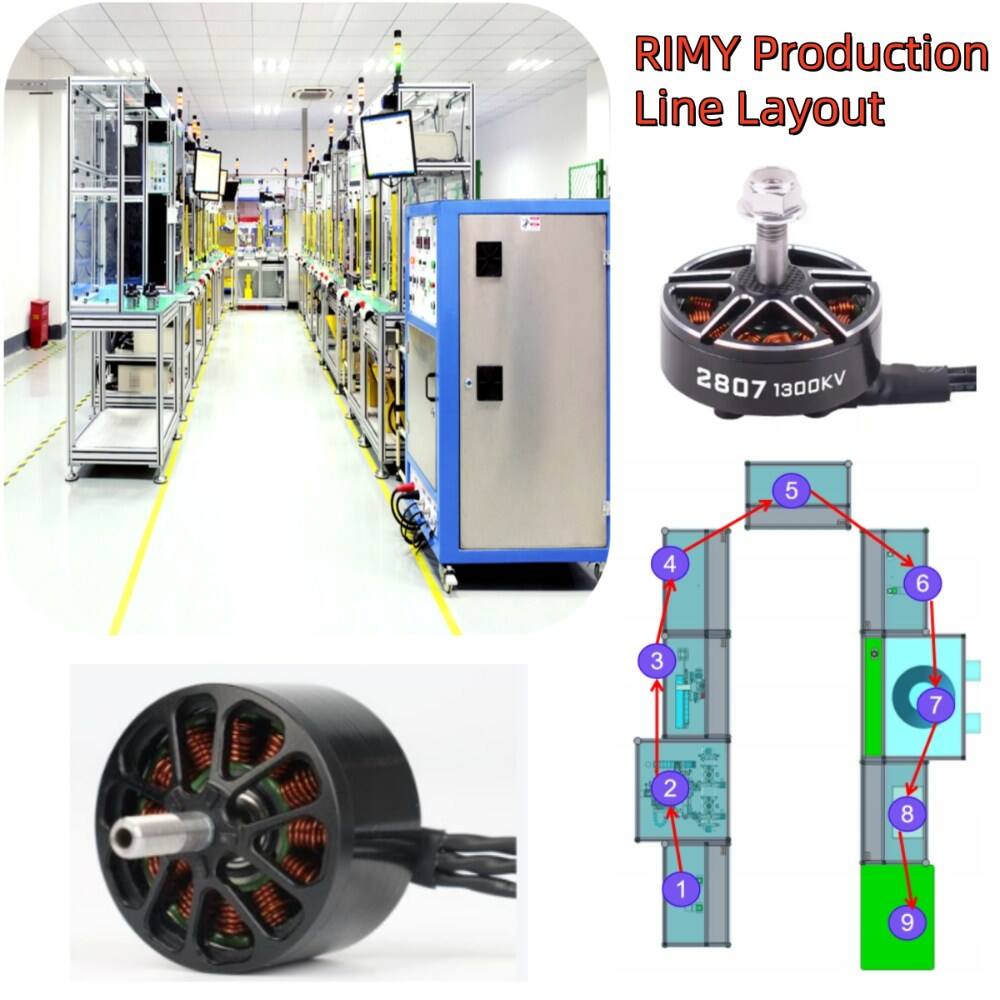
無人航空機(UAV)産業の急速な拡大により、高性能マイクロブラシレスモーターに対する需要が前例のないほど高まり、メーカーは大規模かつ一貫した品質を実現できる先進的自動化ソリューションの導入を迫られています。現代の ドローン用モーター生産ライン システムは、巻線工程において極めて高い精度を達成するとともに、飛行安定性およびエネルギー効率に直接影響を与える繊細なバランス要件を維持する必要があります。農業から物流に至るまで、商用・産業用ドローンの応用分野が多様化・拡大する中、モーター製造メーカーには、生産ワークフローの最適化、サイクルタイムの短縮、および過酷な運用環境下で性能を損なう可能性のあるばらつきの排除が、さらに強く求められています。
自動巻線機械および動的バランス調整システムにおける最近の技術的ブレイクスルーは、ドローン用モーターの生産ライン効率に対する製造業者のアプローチを根本的に変革しました。これにより、厳格な品質基準を満たすと同時に、生産能力(スループット)を劇的に向上させることが可能になりました。これらの革新は、従来の製造手法に伴う労働集約型の手作業工程や品質ばらつきといった、長年にわたり生産能力を制約してきた重要なボトルネックに対処しています。高精度ロボティクス、リアルタイム監視システム、およびインテリジェント制御アルゴリズムを統合することで、現代の生産設備は、航空宇宙グレード部品に求められる厳しい公差を維持しつつ、今日の急速に変化する市場において競争力を発揮するために必要な一貫性とスピードを実現しています。
モーター生産を革新する先進巻線技術
外側ロータ構成向け高精度フライヤー巻線システム
自動化フライヤー巻線技術の導入は、現代のマルチローター機の大多数を駆動する外側ロータ形ブラシレスDCモーターの製造を含む、ドローン用モーター生産ラインの運用において、画期的な飛躍を意味します。張力の一貫性やワイヤー配置の精度に課題を抱える従来のニードル巻線方式とは異なり、フライヤー巻線システムは回転スピンドルを用いて、マイクロメートル単位の高精度で銅線をステータコア上に正確に巻き付けます。この機械的アプローチにより、すべての相において均一な巻線密度が確保され、不均一なターン分布に起因するホットスポットや磁気的アンバランスが解消されます。フライヤーヘッドの回転運動によって、巻線工程全体を通じて最適なワイヤー張力が自然に維持されるため、モーター性能の劣化や寿命短縮を招くワイヤーの伸びや緩みを防止できます。
ドローン用モーターの生産ライン向けに特別に設計された最新式のフィーラー巻線装置は、複数軸の運動を極めて高い同期精度で制御するサーボ駆動式ポジショニングシステムを採用しています。巻線ヘッドは、スロット形状、ワイヤーゲージ仕様、充填率要件を考慮したプログラマブルな軌道に従って動作し、内蔵センサーからのリアルタイムフィードバックに基づいて、自動的に速度および張力パラメーターを調整します。この適応型制御機能は、異なるモーター設計やワイヤー仕様への切り替え時に特に有効であり、作業者は時間を要する機械的調整を行う代わりに、単に新しい巻線レシピを読み込むだけで済みます。その結果、設備切替時間(チェンジオーバー時間)が劇的に短縮され、かつ、従来数時間もの生産時間を消費していた試行錯誤によるセットアップ手順が完全に排除されます。
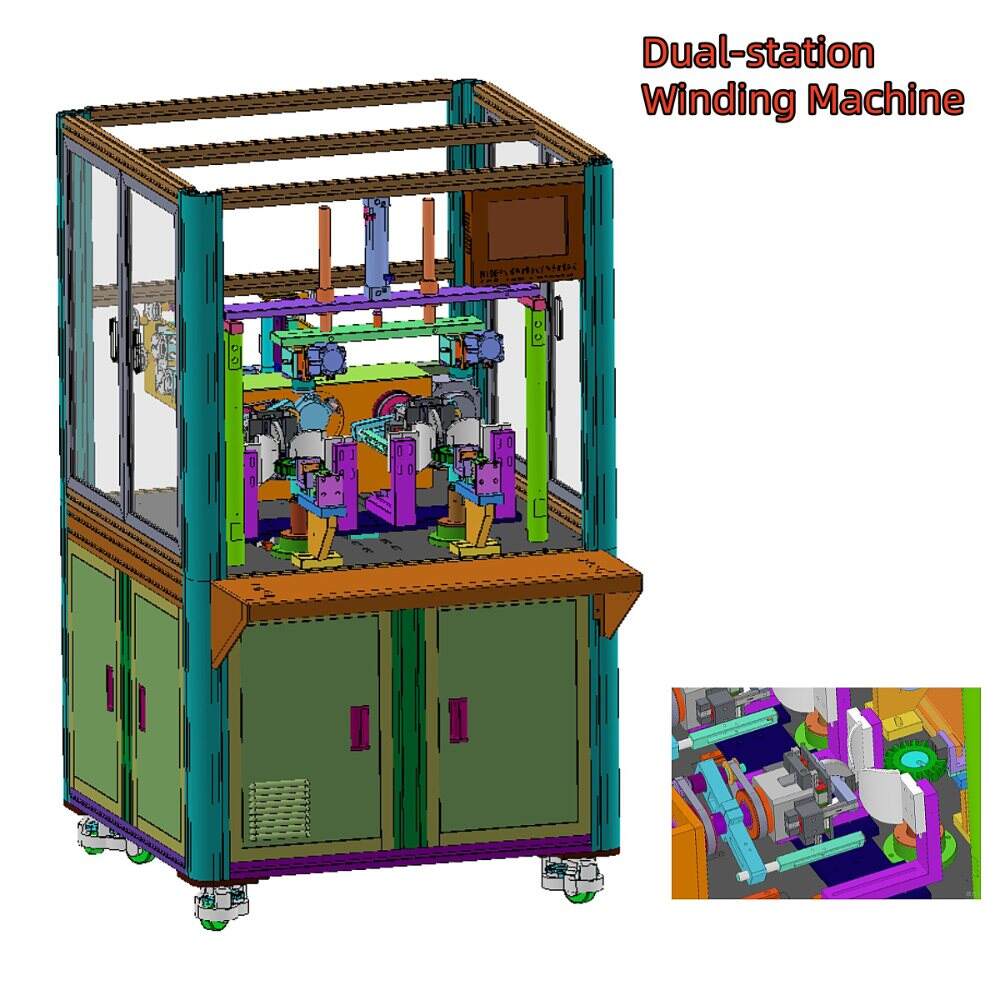
連続生産フローを実現するデュアルステーション構成
ドローン用モーターの生産ライン設備に二工房(ダブルステーション)構成を導入することは、設備の稼働率を最大化し、ローディングおよびアンローディング作業中の待機時間を最小限に抑えるための重要な戦略として注目されています。この構造設計では、単一の機械設置面積内に2つの独立した作業ゾーンを配置することで、巻線ヘッドが現在のユニットの作業を完了している間に、オペレーターが次のステータアセンブリの準備を並行して行えるようになります。一方の工房が巻線サイクルを終了すると、機械制御装置は即座に他方の工房へ動作をシームレスに切り替え、単一工房方式と比較して実質的に生産能力を2倍にする重複型ワークフローを実現します。単位あたりのサイクルタイムの短縮は、特に大量生産において顕著であり、わずかな効率向上でも、全体の生産能力を大幅に高める結果につながります。
デュアルステーション設計の理念は、単なる生産性向上を越えて、ドローン用モーターの生産ラインにおけるより高度な品質管理統合を可能にします。製造業者は、一方のステーションを巻線作業専用に割り当て、他方のステーションを自動検査やリード端子処理・絶縁被覆などの二次工程向けに設定できます。この並列処理機能により、品質検証を生産と同時に行うことが可能となり、欠陥を即座に検出できるため、再加工コストが大幅に増加する下流工程で問題が発覚するのを未然に防ぎます。さらに高度な実装では、視覚検査システムおよび電気的試験モジュールを組み込み、部品を後続の生産工程へ送る前に巻線の健全性を検証することで、巻線機を単一目的の装置ではなく、包括的な品質ゲートへと変革しています。
張力ばらつきを解消するワイヤ取扱いシステム
巻線工程全体にわたってワイヤー張力の一定性を維持することは、ドローン用モーターの生産ラインにおいて、モーター性能の一貫性を左右する最も重要な要因の一つです。巻線中の張力変動は、完成コイルの寸法不均一を引き起こし、局所的な圧縮または緩み領域を生じさせ、これがモーター運転時に磁場の非対称性として現れます。こうした非対称性は、直接的に振動の増加、効率の低下、および完成ドローンモーターにおけるベアリングの早期摩耗へとつながります。この関係性に対する認識が、スプール径の変化や環境変動を問わず、極めて狭い許容範囲内で張力を維持するための閉ループ制御を採用した高度なワイヤー張力制御システムの開発を促進してきました。
現代的なドローン用モーター生産ライン設備は、供給スプールと巻線ヘッドの間のワイヤー経路に配置された高精度ロードセルを用いて、ワイヤー張力を継続的に監視するアクティブ張力制御モジュールを統合しています。マイクロプロセッサ制御装置が、これらのリアルタイム測定値を事前にプログラムされた設定値と比較し、検出されたずれを即座に補正するために、張力制動力またはキャプスタンモーター回転速度を瞬時に調整します。この動的制御は、マイクロモーター用途で一般的な極細マグネットワイヤーを巻線する際に特に重要であり、わずかな張力の急上昇でもワイヤーの断線を引き起こす一方、張力が不足すると緩く信頼性の低い巻線となってしまいます。その結果、初回合格率が著しく向上し、従来の手作業および半自動巻線工程で長年問題となっていたワイヤー関連の欠陥が完全に解消されます。
工程内品質保証のための動的バランス調整機能の統合
ドローン性能におけるローターバランスの重要性を理解する
ブラシレス・アウトランナー構成において、モーターのローターと機体のプロペラが直接機械的に結合されているため、ドローン用モーターのバランス要求は、従来の電動モーター用途をはるかに上回ります。ローターアセンブリにおけるごく微小な質量非対称性であっても、回転速度の二乗に比例して遠心力が増大し、これが機体全体に振動として伝播し、飛行安定性、制御精度、およびペイロード品質を劣化させます。プロフェッショナルな映像撮影用ドローンや精密農業向けUAVでは、こうした振動が直接センサーデータを損なうため、ミッション目標の達成が危ぶまれます。このため、メーカーはドローンモーターの量産工程において、ミリグラム・ミリメートル単位で測定されるバランス許容誤差を達成しなければならず、これは高度な計測および補正能力を要する厳しい基準です。
従来のモーターのバランス調整手法では、この作業を組立後の独立した工程として扱い、不均衡ベクトルを特定し、手動で補正用ウェイトを追加または除去するために、専門的な設備と熟練した技術者を必要としていました。このワークフローは、ドローン用モーターの生産ラインにおける処理能力に大きなボトルネックを引き起こすとともに、オペレーターの技量や測定機器のキャリブレーション状態に応じて品質ばらつきが生じる原因にもなりました。また、巻線工程とバランス調整工程が時間的に分離されていたため、設計由来のバランス問題は部品に既に相当な付加価値が付与された後に初めて明らかになり、根本原因の分析および是正措置がより困難かつ高コストとなる結果を招きました。現代の生産哲学では、巻線および組立ラインにバランス調整機能を直接統合することが、効率性および品質の両面において劇的な向上をもたらすことが認識されています。
リアルタイム補正機能付き自動バランス調整システム
先進的なドローン用モーターの生産ラインでは、巻線およびポッティング工程直後にローターアセンブリのバランスを測定するインライン・バランス調整ステーションが採用されるようになりました。この際、部品は厳密に制御された姿勢で治具に固定されたままとなります。これらのシステムでは、高速スピンドルを用いてローターアセンブリを実稼働時の回転速度で回転させ、加速度計アレイによって質量不均衡の大きさおよびその角度位置を検出します。高度な信号処理アルゴリズムにより、環境ノイズや機械振動固有の信号がフィルタリングされ、真のローターバランス不良ベクトルが極めて高精度で分離されます。全測定サイクルは数秒で完了し、即時のフィードバックを提供することで、後工程での品質分析ではなく、リアルタイムでの工程調整を可能にします。
不釣り合い特性が定量化されると、自動補正システムは、検出された不釣り合いの程度および性質に応じて、複数の利用可能な手法を用いて正確な補正処置を実行します。許容範囲内の軽微な非対称性については、システムが最終組立時にローターを特定の方向に配置するよう指示し、モーター・プロペラ統合システムのバランスを最適化します。中程度の不釣り合いが検出された場合は、レーザーアブレーションまたは高精度ドリル加工による自動的な材料除去プロセスが起動し、ローターベル上の計算済み角度位置で選択的に質量を削減します。補正能力を超える重大な不釣り合いが発生した場合、該当部品は自動的に不良品収容ボックスへと送られ、同時に品質管理担当者に対して上流工程における潜在的な工程ばらつきを即時通知します。この閉ループ方式により、ドローン用モーター生産ラインの構造において、バランス調整作業は単なる補正作業から予測型品質管理メカニズムへと進化します。
統計的プロセス管理によるバランスデータ分析
ドローン用モーターの生産ライン設備へのバランス測定システムの統合により、単なる合格・不合格判定にとどまらない、極めて価値あるデータセットが生成されます。すべてのバランス測定は、巻線パターンの一貫性および中心位置、ポッティング工程における接着剤分布の均一性、ローターベル製造の幾何学的精度といった情報を捉えています。このデータを複数の生産ロットにわたり集約し、統計的プロセス管理(SPC)の手法を適用することで、メーカーは、こうした包括的な測定がなければ見過ごされてしまうような、工程能力およびドリフト傾向について前例のない可視化を実現できます。
先見の明のあるメーカーは、このバランスデータを活用して、ドローンモーターの生産ライン設備に対する予知保全プロトコルを導入しています。これにより、巻線ヘッドの位置精度や治具の摩耗といった、わずかな劣化を、それらが不良品の発生を引き起こす前に特定できます。トレンド分析アルゴリズムは、平均不釣り合い量の緩やかな変化や、不釣り合いベクトルの方向分布における変化を検出し、潜在的な問題の早期警戒を可能にします。このような能動的なアプローチにより、非適合部品の大量生産という高コストな事態を未然に防ぎ、また、時間ベースではなく状態ベースの保守スケジューリングを実現することで、設備の稼働率を最大化します。バランス装置を単なる品質ゲートから包括的な工程監視ツールへと進化させることは、製造哲学における根本的な転換を意味し、複数の業務領域にわたって相乗効果をもたらします。
自動化アーキテクチャおよび制御システム統合
柔軟な生産を実現するプログラマブル・ロジック・コントローラ(PLC)
現代のドローン用モーター生産ライン設備の基盤となる制御システム構成は、機械的・電気的・空気圧的サブシステム間の複雑な連携を統括する産業用レベルのプログラマブル・ロジック・コントローラ(PLC)に依拠しています。これらのコントローラは、自動巻線および自動バランス調整作業に必要なリアルタイム処理コードを実行し、サーボモーターの動作を同期化し、各種センサーからの入力を管理し、安全関連のインタロック機能を協調的に制御するとともに、巻線パターン、張力パラメーター、品質受入基準を定義するプロセス・レシピを実装します。最新のPLCが備える演算処理能力および決定論的実行特性により、高速巻線作業中の精度維持に不可欠なサブミリ秒単位の応答時間を実現するとともに、人間と機械のインターフェース(HMI)表示や工場レベルの上位システムとのネットワーク通信も同時に管理できます。
レシピベースのプログラミング・パラダイムは、ドローン用モーターの生産ライン・コントローラーにおいて標準となっています。これにより、オペレーターは数百種類に及ぶ異なるモーター構成を、個別のパラメーターセットとして保存し、エンジニアリング介入を必要とせずに即座に呼び出すことが可能になります。各レシピには、特定のモーター仕様を定義するすべての変数が含まれており、たとえばステータの寸法、スロット数、電線の線径、各相あたりの巻き数、巻線パターンのトポロジー、張力設定値、品質許容範囲などが該当します。このデータベース駆動型アプローチにより、製品の切替(チェンジオーバー)時間が大幅に短縮され、リアルタイムの需要信号に基づいて異なるモーター種別を同一設備で混流生産する戦略の実現が可能になります。手動によるセットアップ手順が不要になることで、チェンジオーバー時間の短縮に加え、製品品質の低下や高価な金型の損傷を招く人為的ミスの発生リスクも低減されます。
閉ループ工程制御のためのセンサー統合
現代のドローン用モーター生産ライン設備には、重要な工程変数を継続的に監視し、フィードバック制御アルゴリズムに必要な信号を提供する広範なセンサネットワークが組み込まれています。ワイヤ張力トランスデューサ、位置エンコーダ、温度センサ、およびビジョンシステムは、リアルタイムのデータストリームを生成し、コントローラがこれを分析して最適な運転条件からの逸脱を検出します。このような多様なセンサを備えた環境により、周囲温度の変化によるワイヤ弾性の変動、工具の徐々なる摩耗による幾何学的関係の変化、あるいは供給電圧の変動によるサーボモータ性能への影響など、さまざまな要因に対して自動的に補償するアダプティブ制御戦略が実現されます。オープンループ型のプログラム制御から、クローズドループ型のアダプティブ制御への移行は、プロセスの堅牢性および製品の一貫性に直接影響を与える、根本的な能力向上を意味します。
ビジョンシステムは、ドローン用モーターの生産ラインにおいて特に革新的なセンサーとして登場し、従来のリミットスイッチや近接センサーをはるかに凌ぐ機能を提供しています。特殊照明と画像処理アルゴリズムを備えた高解像度カメラにより、配線の適正なルーティング確認、巻線の交差・損傷検出、リード線の正しい配置確認、および完成コイルの寸法特性測定が実現されます。これらの非接触型検査機能は、生産速度で動作しサイクルタイムを一切追加することなく、統計的サンプリングによるロット単位の品質確認に頼らず、製造されるすべてのユニットに対して包括的な品質検証を実施します。また、得られた画像データは各モーターの製造特性を記録する永続的なデジタル記録となり、航空宇宙・医療分野で必須となるトレーサビリティ体制を支えるとともに、現場での故障発生時に原因究明を容易にします。
産業用接続性および製造実行システム(MES)の統合
ドローン用モーターの生産ライン設備の進化は、工場全体の運用データを統合する企業向け製造実行システム(MES)および産業用IoTプラットフォームとの接続性をますます重視する方向に進んでいます。最新の巻線機には、OPC-UA、MQTT、Modbus TCPなどの産業用プロトコルをサポートするEthernetインターフェースが搭載されており、上位システムとの双方向通信を可能にしています。このような接続アーキテクチャにより、生産計画担当者はリモートから設備に対して生産スケジュールやレシピ選択を設定できると同時に、サイクルタイム、品質良品率、保守アラート、エネルギー消費パターンなど、リアルタイムのパフォーマンス指標を収集できます。こうして得られるデータの可視化は、根拠に基づく意思決定を支援し、個々の機械レベルでは見過ごされがちな最適化機会を特定する高度な分析を可能にします。
製造実行システム(MES)との統合により、孤立したドローン用モーター生産ラインの設備が、設計エンジニアリング、生産計画、品質保証、保守部門間で情報がシームレスに流通するスマートファクトリー・ネットワーク内のノードへと変貌します。設計エンジニアが更新されたモーター仕様をリリースすると、手動によるデータ入力に起因する転記ミスを回避するために、変更内容が自動的に生産レシピに反映されます。品質管理システムは、規格外状態を即時に検知し、不適合品が顧客へ出荷される前に、自動的な保留処置および調査ワークフローを起動します。保守チームは、機械学習アルゴリズムが設備の性能傾向を分析して生成した予知的アラートにアクセスでき、生産停止を招く重大な故障が発生する前に介入することが可能になります。このような高度な統合は、精密モーター製造という専門分野において、Industry 4.0 の概念が現実に具現化されたものと言えます。
プロセス最適化を通じた運用卓越性
品質を犠牲にすることなくのサイクルタイム短縮
ドローン用モーターの生産ラインにおける単位製品あたりの生産時間短縮は、最終的に製品価値および顧客満足度を決定する品質要件と慎重にバランスを取る必要があります。設備の能力を超えた巻線速度の向上や検査の厳格さの緩和といった過激なサイクルタイム短縮策は、結果として発生する不良率の上昇により、保証費用の増加やブランド評判の損失を通じて収益性を逆に損なうため、本末転倒です。持続可能な効率向上は、付加価値を生まない待機時間、不必要な動作、および品質結果に影響を与えることなく削減または統合可能な工程ステップを特定するために、生産サイクル全体を体系的に分析することから得られます。タイムスタディ手法によれば、実際の付加価値を生む巻線およびバランス調整作業は、総サイクル時間のわずか一部しか占めておらず、残りの時間は資材搬送、待ち時間、および自動化が可能な手動による検証ステップなどに浪費されています。
ドローン用モーターの生産ラインにおいて、迅速な金型交換システムおよび自動化された資材ハンドリングを導入することは、サイクルタイム短縮のための最も効果的な戦略の一つです。交換が素早く行える巻線ノズルおよび治具システムにより、作業者は数時間かかる従来の設定変更を数分で完了させ、異なるモーターサイズへの設備再構成が可能になります。これにより、スケジュールの柔軟性が劇的に向上し、設備切替コストを回収するために必要なロットサイズも大幅に縮小されます。上流の部品保管設備および下流の組立工程と連携する自動ローディングシステムは、作業者による手動部品取り扱いを排除し、その結果として発生する作業者の時間的ロスだけでなく、部品の損傷や汚染リスクも低減します。協働ロボット(コボット)は、繰り返しを伴うローディングおよびアンローディング作業をますます多く担うようになっており、人間の作業者は品質検証、設備監視、継続的改善活動といった高付加価値業務に集中できるようになります。こうした段階的な改善がもたらす累積的効果は、工場の床面積や新規設備投資を増加させることなく、実質的な生産能力の大幅向上を実現します。
根本原因の排除による初回合格率の最適化
初回合格率の最大化は、ドローン用モーターの生産ライン効率を向上させる最も強力な手段です。再作業または廃棄を要する不具合は、材料・人件費・設備稼働時間を消費する一方で、収益を一切生み出しません。従来の品質管理手法は、検査による不具合の検出に重点を置いていますが、この戦略は問題を単に定量化するだけで、その根本原因には対処しません。世界トップクラスの製造企業は、代わりに体系的な根本原因分析手法を導入し、各不具合カテゴリーを特定の工程変数や設備状態まで遡って特定することで、再発防止を可能にする的確な是正措置を実施しています。工程データの統計的相関分析により、入力変数と品質結果との間に、日常的な観察では見過ごされがちな関係性が明らかになり、エンジニアが最も効果的な改善機会へと導かれます。
ドローン用モーターの生産ラインにおける、反応的な欠陥管理から能動的な欠陥予防への移行には、技術的改善と同様に、組織文化の変革が不可欠である。作業員は、異常な状況が発生した際に生産を即座に停止できる権限を与えられ、品質に疑問のある製品をロット完了まで継続して製造するのではなく、その場で対応するよう訓練される必要がある。品質担当者は、品質事象を迅速に調査できるよう、包括的な工程データおよび分析ツールへのアクセス権を有する必要があり、根拠の薄い逸話的証拠や直感に頼るのではなく、客観的なデータに基づいた判断を行うことが求められる。マネジメントシステムは、一時的な生産中断という短期的なコストを罰するのではなく、根本原因の特定・解決に貢献したチームを認識し、報いる仕組みを備えるべきである。こうした哲学的変革を成功裏に実施した企業は、一貫して初回合格率95%を超える成果を達成しており、品質を単なるコストセンターから、プレミアム価格設定や顧客との優先的関係構築を可能にする競争優位性へと転換させている。
エネルギー効率と持続可能性の検討事項
現代の ドローン用モーター生産ライン 設計は、運用コストの削減と企業の持続可能性に関するコミットメントおよび規制遵守目標の達成を両立させるため、エネルギー効率性への配慮をますます取り入れるようになっています。サーボ駆動式モーションシステムは、従来の油圧・空気圧アクチュエータを置き換え、同等の性能を発揮しながら、動作中のみ電力を消費するため、連続運転が必要なポンプやコンプレッサによる無駄な電力消費を回避します。可変周波数ドライブ(VFD)は、モーターの全速度範囲にわたってその運転を最適化し、絞り込みや機械式トランスミッションによる制御が前提となる固定速度モーターに伴うエネルギー損失を解消します。LED照明および高効率暖房システムにより、施設全体のエネルギー消費量がさらに削減され、一部の先進的な設備では、電気部品から発生する廃熱を回収して寒冷期の換気空気の予熱に活用する熱回収システムも導入されています。
直接的なエネルギー消費を越えて、持続可能なドローン用モーター生産ラインの実践では、製造工程の制御を向上させることで材料の廃棄を削減し、銅線、包装材、洗浄工程で使用される溶剤などのリサイクルシステムを導入しています。予知保全戦略により、設備の寿命が延長され、主要部品の早期交換に伴う環境負荷が低減されます。一部のメーカーでは、産業廃棄物を処理できる専門リサイクル業者との提携および徹底した廃棄物分別を通じて、モーター生産工程において「ゼロ・ランドフィル(埋立ゼロ)」を達成しています。こうした持続可能性に関する取り組みは、ドローンメーカーが自社の顧客からサプライチェーン全体における環境責任の実証を強く求められる中で、購買判断にますます大きな影響を与えています。その結果、測定可能な持続可能性パフォーマンスを示すモーター供給企業は、競争上の優位性を獲得しています。
生産ラインのアップグレードに向けた戦略的実施上の検討事項
生産能力計画およびスケーラビリティ評価
先進技術への投資を検討している組織 ドローン用モーター生産ライン 設備は、提案されたシステムが現在の生産量要件および将来の成長見通しの両方に適合することを保証するため、厳格な能力分析を実施しなければなりません。能力が不足した設備は、即座にボトルネックを生じさせ、生産量を制約し、顧客への納期遵守のために高額な残業や外部委託を余儀なくされます。一方、過剰な設備能力は、投資収益率が不十分な未使用資産に資金を拘束することになります。効果的な能力計画には、既存顧客からの有機的成長および異なるモーター構成や品質基準を要する可能性のある新規ビジネス機会を含む、複数のシナリオにおける需要予測が不可欠です。また、分析には季節的な需要変動、新製品投入サイクル、および競合他社に対するサプライチェーンの混乱や予期せぬビジネス機会への対応を可能とするための余裕容量の戦略的確保も考慮する必要があります。
スケーラビリティに関する検討事項は、初期の設備容量を越えて、運用中の業務を中断することなく、既存投資を陳腐化させることなく将来的な拡張に対応できるアーキテクチャ上の柔軟性を含む。巻線ヘッドやワークステーションを追加することで容量を増設可能なモジュラー型設備設計は、生産量の増加に伴いシステム全体を交換する必要があるモノリシック型システムと比較して、よりコスト効率の高い成長経路を提供する。施設のレイアウトでは、設備の追加スペースを確保するとともに、電力、圧縮空気、ネットワーク接続といった各種ユーティリティインフラが拡張後の構成を十分にサポートできるよう配慮しなければならない。ソフトウェアアーキテクチャも、追加機器の統合を可能としつつ、システム全体の置き換えや複雑な移行プロジェクトを要しないように設計されるべきである。これらのスケーラビリティ原則を初期投資判断に組み込むことで、組織は市場の機会に迅速かつ効率的に対応できるとともに、設備のライフサイクル全体における総所有コスト(TCO)を最小限に抑えることができる。
従業員のトレーニングと変革管理
高度なドローン用モーター生産ラインの自動化を成功裏に展開するには、複雑なメカトロニクスシステムを操作・保守・最適化するために必要な技術的能力を育成する包括的な人材育成プログラムが不可欠である。従来のモーター巻線作業に求められる手先の器用さや機械的直感は、コンピュータリテラシー、トラブルシューティング手法、およびセンサーやアクチュエーター、制御システムに関する理解といった新たな要件へと置き換わっている。企業は、講義形式の教育、機器ベンダーによる専門訓練、および指導者付き実践演習を組み合わせた体系的な研修カリキュラムへの投資を行う必要がある。最も効果的なプログラムは、オペレーターがプロセスに関する貴重な知識を有しており、これを自動化の導入に活かすべきであり、単に自動化によってその役割が置き換えられてはならないという点を認識している。こうしたプログラムは、人的専門性と機械の能力が互いに補完し合う協働環境を創出し、競合関係に陥らないようにする。
変更管理プロトコルは、技術導入の成功において同様に極めて重要です。見慣れないシステムに対する抵抗は、技術的に優れた自動化プロジェクトであってもその成果を損なう可能性があります。経営陣は、生産ラインの近代化に至った戦略的背景を明確に説明するとともに、従業員が抱える雇用の安定性や職務内容の変化に関する懸念にも配慮する必要があります。オペレーターや技術者を機器の仕様策定および受入試験プロセスに積極的に関与させることで、当事者意識(オーナーシップ)を醸成し、現場から得られる貴重な知見を活用して導入成果の向上を図ることができます。自動化を一気呵成な全面的な置き換えではなく、段階的に導入する戦略を採用すれば、組織は能力を段階的に構築しつつ、生産の継続性を維持することが可能になります。初期の採用者や素早く習得した従業員を称える表彰制度を設けることで、前向きな勢いと同僚間の影響力を生み出し、組織全体における新しい業務手法への適応を加速させることができます。こうした人材中心の変更管理実践を一貫して実行する企業は、自動化投資から得られる「完全生産性達成までの期間」を短縮し、最終的なパフォーマンス水準も高めることに成功しています。
ベンダー選定およびパートナーシップの構築
先進的なドローン用モーター生産ライン設備への投資を決定することは、その能力、対応力、および事業の安定性が、初回設置後数年にわたって運用成功に大きく影響を与える技術パートナーに対して長期的なコミットメントを示すものです。包括的なベンダー評価プロセスでは、設備の仕様や価格だけでなく、アプリケーションエンジニアリング支援、スペアパーツの供給状況、ソフトウェア更新ポリシー、および現地サービスネットワークのカバレッジといった要素も評価されます。既存顧客に対する参考照会は、マーケティング資料では十分に明らかにならない実際の性能およびサポート品質に関する貴重な知見を提供します。財務的安定性分析は、ベンダーが設備の経済的寿命にわたって継続的にサポートを提供できる存続可能性を確認するものであり、サプライヤーが事業を停止したり製品ラインを中止したりした場合に生じる高額なトラブルを回避することを目的としています。
最も成功している導入事例では、ベンダーとの関係が単なる機器の取引的な購入から、双方が共同の成功に向けて相互に投資する戦略的パートナーシップへと進化しています。協働型ベンダーは、標準的なカタログ製品の提供にとどまらず、特定のモーター設計および生産要件に最適化された機械構成を実現するためのアプリケーションエンジニアリング支援リソースを提供します。また、継続的改善活動にも積極的に参画し、生産データを分析して改善機会を特定するとともに、顧客からのフィードバックを製品開発ロードマップに反映させます。パフォーマンス連動型の支払条件、スペアパーツのコンシignment(委託在庫)プログラム、およびトレーニング支援など、柔軟な商業契約は、ベンダーが自社機器に対して持つ確信および顧客の成功との利害一致を示すものです。こうした戦略的関係を築き上げる組織は、自社の内部リソースをはるかに上回るイノベーションパイプラインおよび技術的能力にアクセスでき、急速に進化するドローンモーター市場において持続可能な競争優位性を築くことができます。
よくあるご質問(FAQ)
どの生産量であれば、自動化されたドローン用モーター巻線およびバランス調整設備への投資が正当化されますか?
自動化されたドローン用モーター生産ライン設備の経済的正当性は、通常、年間50,000台を超える生産量で現れますが、具体的な損益分岐点は、人件費、製品構成の複雑さ、品質要件によって異なります。複数のモーターバリエーションを生産する組織では、手作業プロセスと比較してセットアップ時間の短縮および一貫性の向上といったメリットにより、比較的少ない生産量でも自動化の恩恵を受けられます。計算にあたっては、設備の導入費用、設置費用、従業員教育費用、保守費用を含む総所有コスト(TCO)を、予想される設備寿命(7~10年)における人件費削減効果、品質向上効果、および生産能力増加効果と対比させる必要があります。
自動バランス調整システムは、従来の手動バランス調整と比べて、精度および処理能力(スループット)の面でどのように異なりますか?
ドローン用モーターの生産ラインに統合された自動インラインバランス調整システムは、サイクルタイムを30秒未満で処理しながら、残余不平衡量を0.5グラム・ミリメートル未満に達成します。これに対し、手動によるバランス調整では、作業者の熟練度に応じて1~2グラム・ミリメートルの残余不平衡が生じ、単位あたりの所要時間が通常2~5分となります。自動化方式では、主観的な測定解釈が排除されるだけでなく、試験対象となるすべてのユニットについて完全な記録が生成されるため、航空宇宙および医療分野におけるトレーサビリティ要件にも対応できます。また、自動バランス調整の高い一貫性は、特に高性能ドローン用途において、ユニット間の性能ばらつきを解消し、顧客からの苦情や保証コストの発生を防ぐ上で極めて有効です。
メーカーは、自動巻線装置に対してどのような保守要件を想定すべきでしょうか?
現代のドローン用モーター生産ライン設備には、巻線ノズルやワイヤーガイドなどの摩耗部品に対する週次点検から、機械システムへの四半期ごとの潤滑、センサーや計測器に対する年次校正に至るまでの予防保全(PM)が求められます。高度な機器に組み込まれた予知保全(PdM)機能は、各部品の状態をリアルタイムで監視し、故障発生前に異常の兆候を検出して保守担当者にアラートを通知することで、従来の時間ベース保全から、状態ベース保全へと保全戦略を転換します。組織は、設備導入コストの年間約5~8%を、交換部品、消耗品、校正サービスなどの保全費用として予算化すべきです。同時に、技術担当者が日常的な保全作業および基本的なトラブルシューティングを、ベンダー支援を必要とせずに自立して実施できるよう、十分な教育訓練を受けることが重要です。
既存の手動または半自動生産ラインは、完全な交換を必要とせず、段階的にアップグレード可能でしょうか?
多くの製造業者は、機能している設備を全面的に交換するのではなく、既存のドローン用モーター生産ラインの運用に自動化機能を段階的に導入する、段階的近代化戦略を成功裏に実施しています。一般的なアップグレード手法には、手動巻線機にプログラム可能な張力制御システムを後付けする、巻線欠陥を検出するための画像検査ステーションを追加する、あるいは既存設備と連携して動作する自動ローディングシステムを導入するなどがあります。段階的アップグレードと完全交換のどちらが技術的に実現可能で経済的に正当化されるかは、既存設備の使用年数および状態、ベンダーによる後付けキットおよび統合支援の有無、ならびに現在の機械アーキテクチャが根本的な再設計を伴わず、最新の制御システムおよびセンサー技術に対応可能かどうかに依存します。