ข้อมูลจำเพาะ/คำอธิบาย ประเภทเครื่องมือ เครื่องวัดภาพ 2D (ระบบวิดีโอวัด) แอปพลิเคชันหลัก การวัดจุดศูนย์กลางทรงกลม (เช่น เบ้าลูกปืน, เลนส์ออปติก, ชิ้นส่วนกลไกทรงกลม) วิธีการวัด ไม่...

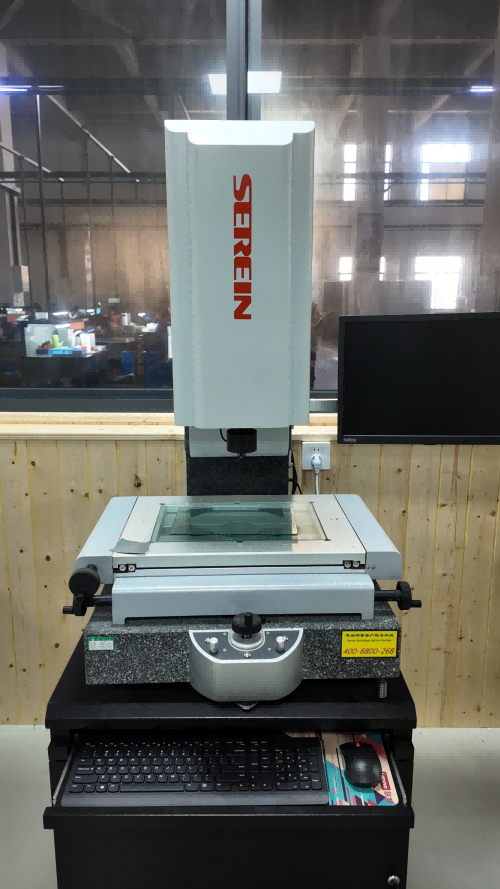 |
หมวดหมู่ | ข้อมูลจำเพาะ/คำอธิบาย |
| ประเภทของอุปกรณ์ | เครื่องวัดภาพ 2D (ระบบการวัดวิดีโอ) | |
| การใช้งานหลัก | การวัดศูนย์ทรงกลม (เช่น เหล็กกลิ้ง เลนส์ออปติก ชิ้นส่วนกลไกทรงกลม) | |
| วิธีการวัด | การถ่ายภาพด้วยแสงแบบไม่สัมผัสพร้อมกล้อง CCD ความละเอียดสูง | |
| ฟังก์ชันหลัก | - การคำนวณพิกัด 2D | |
| - การวิเคราะห์ตำแหน่งศูนย์ของทรงกลม | ||
| ความแม่นยำในการวัด | ±0.001 มม. | |
| ความละเอียด | 0.5 ไมครอน | |
| ข้อดี | - การวัดรูปทรงกลมอย่างรวดเร็ว | |
| - ขึ้นอยู่กับผู้ปฏิบัติงานน้อยที่สุด |
 |
หมวดหมู่ | ข้อมูลจำเพาะ/คำอธิบาย |
| ประเภทของอุปกรณ์ | ศูนย์วัดเกียร์ | |
| การใช้งานหลัก | การวิเคราะห์อย่างครอบคลุมของพารามิเตอร์เกียร์ (เช่น เกียร์เส้นตรง เกียร์เกลียว เกียร์มุม) | |
| พารามิเตอร์หลัก | - จำนวนฟัน (Z) | |
| - มอดูล (M) | ||
| - มุมแรงดัน (α) | ||
| - มุมเกลียว (β) | ||
| มิติที่วัดได้ | - ความกว้างฟัน | |
| - เส้นผ่านศูนย์กลางปลายฟัน (Da) | ||
| - เส้นผ่านศูนย์กลางโคนฟัน (Df) | ||
| - เส้นผ่านศูนย์กลางวงกลมฐาน | ||
| ความแม่นยำในการวัด | ±0.005 มม. | |
| ข้อดี | - การปรับสมดุลพารามิเตอร์หลายค่า | |
| - การประเมินความแม่นยำของเรขาคณิตเกียร์ |
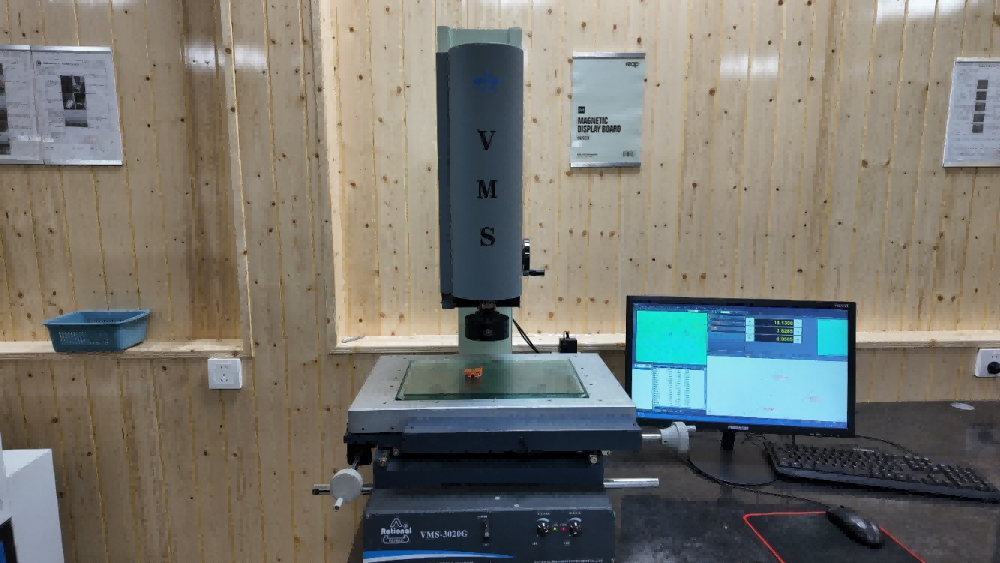 |
หมวดหมู่ | ข้อมูลจำเพาะ/คำอธิบาย |
| ประเภทของอุปกรณ์ | เครื่องวัดภาพ (ระบบวิดีโอวัด) | |
| การใช้งานหลัก | การวัดแบบไม่สัมผัสสำหรับพารามิเตอร์ทางเรขาคณิต (เช่น ชิ้นส่วนที่มีความแม่นยำ ส่วนประกอบอิเล็กทรอนิกส์ แม่พิมพ์) | |
| ฟังก์ชันหลัก | - การวัดความยาว | |
| - การวัดมุม | ||
| - การวัดรัศมี (R角) | ||
| ความแม่นยำในการวัด | ±0.003 มม. | |
| ความละเอียด | 0.5 ไมครอน | |
| พารามิเตอร์ที่วัดได้ | - มิติเชิงเส้น (ความยาว, ความกว้าง) | |
| - คุณสมบัติเชิงมุม | ||
| - รัศมีขอบมน/มุม | ||
| ข้อดี | - การสแกนด้วยแสงอัลตราโซนิกความเร็วสูง | |
| - การสัมผัสชิ้นส่วนเพียงเล็กน้อยสำหรับพื้นผิวที่บอบบาง |
 |
หมวดหมู่ | ข้อมูลจำเพาะ/คำอธิบาย |
| ประเภทของอุปกรณ์ | เครื่องวัดความขRุ่ยผิว | |
| การใช้งานหลัก | การวัดพารามิเตอร์ความขRoughnessของผิว (เช่น Ra, Rz, Ry) สำหรับชิ้นส่วนที่ถูกกลึง, แม่พิมพ์ และชิ้นส่วนที่มีความแม่นยำ | |
| พารามิเตอร์หลัก | - Ra (ความขRoughnessเฉลี่ยทางคณิตศาสตร์) | |
| - Rz (ความสูงสูงสุดของโปรไฟล์) | ||
| - Ry (ความขRoughnessรวม) | ||
| ช่วงการวัด | Ra: 0.01–20 μm | |
| Rz/Ry: 0.1–100 μm | ||
| ความละเอียด | 0.001 μm | |
| ความแม่นยำ | ±5% (ตามมาตรฐาน ISO 4287) | |
| ข้อดี | - ดีไซน์พกพา | |
| - ตัวเลือกการวัดแบบสัมผัสหรือไม่สัมผัส | ||
| - แสดงข้อมูลแบบเรียลไทม์ |
 |
หมวดหมู่ | ข้อมูลจำเพาะ/คำอธิบาย |
| ประเภทของอุปกรณ์ | เครื่องทดสอบความแข็งแบบร็อกเวลล์ | |
| การใช้งานหลัก | การวัดความแข็งของวัสดุ (เช่น เหล็กกล้า, สิ่งที่ผ่านการบำบัดความร้อน) | |
| มาตราการทดสอบ | HRC (มาตราความแข็งร็อกเวล C) | |
| ช่วงการวัด | HRC: 20–70 | |
| วิธีการทดสอบ | วิธีการกดด้วย kimberlite (หัวกดรูปทรงเพชร, แรงทดสอบรวม 150 กกฟ) | |
| ความแม่นยำ | ±1 HRC (ตามมาตรฐาน ASTM E18) | |
| ข้อดี | - อ่านค่าได้รวดเร็วและตรงไปตรงมา | |
| - ต้องเตรียมผิวน้อยมาก | ||
| - มีความซ้ำสูง |
 |
หมวดหมู่ | ข้อมูลจำเพาะ/คำอธิบาย |
| ประเภทของอุปกรณ์ | เครื่องวัดภาพ (ระบบวิดีโอวัด) | |
| การใช้งานหลัก | การวัดแบบไม่สัมผัสสำหรับพารามิเตอร์ทางเรขาคณิต (เช่น ชิ้นส่วนที่มีความแม่นยำ ส่วนประกอบอิเล็กทรอนิกส์ แม่พิมพ์) | |
| ฟังก์ชันหลัก | - การวัดความยาว | |
| - การวัดมุม | ||
| - การวัดรัศมี (R角) | ||
| ความแม่นยำในการวัด | ±0.003 มม. | |
| ความละเอียด | 0.5 ไมครอน | |
| พารามิเตอร์ที่วัดได้ | - มิติเชิงเส้น (ความยาว, ความกว้าง) | |
| - คุณสมบัติเชิงมุม | ||
| - รัศมีขอบมน/มุม | ||
| ข้อดี | - การสแกนด้วยแสงอัลตราโซนิกความเร็วสูง | |
| - การสัมผัสชิ้นส่วนเพียงเล็กน้อยสำหรับพื้นผิวที่บอบบาง |
 |
หมวดหมู่ | ข้อมูลจำเพาะ/คำอธิบาย |
| ประเภทของอุปกรณ์ | เครื่องวัดความกลม | |
| การใช้งานหลัก | การตรวจจับความกลมของแกนและวิเคราะห์ฮาร์โมนิก (เช่น ชิ้นส่วนหมุน, เบ้าริ่ง, แกนที่แม่นยำ) | |
| พารามิเตอร์หลัก | - ข้อผิดพลาดของความกลม | |
| - องค์ประกอบฮาร์โมนิก (เช่น การวิเคราะห์การสั่น) | ||
| ความแม่นยำในการวัด | ±0.1 ไมครอน | |
| ความละเอียด | 0.01 ไมโครเมตร | |
| วิธีการวัด | เซนเซอร์หมุนหรือแกนความแม่นยำสูงพร้อมหัววัดแบบสัมผัส/ไม่สัมผัส | |
| ข้อดี | - การประเมินรูปวงกลมด้วยความแม่นยำสูง | |
| - การวิเคราะห์การบิดเบือนฮาร์โมนิกแบบไดนามิก |